|
DOI: 10.7256/2454-0714.2018.2.26217
Äŕňŕ íŕďđŕâëĺíč˙ ńňŕňüč â đĺäŕęöčţ:
07-05-2018
Äŕňŕ ďóáëčęŕöčč:
13-06-2018
Ŕííîňŕöč˙:
 đŕáîňĺ ńôîđěóëčđîâŕíű îńíîâíűĺ ňđĺáîâŕíč˙ ę áîđňîâîěó ęîěďëĺęńó ęîńěč÷ĺńęîăî ëĺňŕňĺëüíîăî ŕďďŕđŕňŕ (ĘËŔ) äë˙ öĺëĺé íŕâĺäĺíč˙ č ďîńŕäęč íŕ ěŕëűĺ ňĺëŕ ńîëíĺ÷íîé ńčńňĺěű. Îńíîâíűěč çŕäŕ÷ŕěč ńďóńęŕĺěűő č ďîńŕäî÷íűő ŕďďŕđŕňîâ ˙âë˙ţňń˙ ňîđěîćĺíčĺ č ńáëčćĺíčĺ ń ďîâĺđőíîńňüţ íĺáĺńíîăî ňĺëŕ, ďîńŕäęŕ, đŕáîňŕ íŕ ĺăî ďîâĺđőíîńňč, âîçěîćíî, âçëĺň ń ďîâĺđőíîńňč äë˙ äîńňŕâęč âîçâđŕůŕĺěîăî ŕďďŕđŕňŕ íŕ çĺěëţ. Îáĺńďĺ÷čâŕ˙ âűńîęčĺ ňđĺáîâŕíč˙ ę ňî÷íîńňč č íŕäĺćíîńňč đŕáîňű áîđňîâîăî ęîěďëĺęńŕ íŕâĺäĺíč˙ č ďîńŕäęč ďđĺäëîćĺíî ŕęňóŕëüíîĺ đĺřĺíčĺ. Čńďîëüçó˙ ňđŕäčöčîííűé ďîäőîä ę ěîäĺëčđîâŕíčţ ďđîöĺńńîâ č ńčńňĺě â đŕáîňĺ ńîçäŕíŕ ôóíęöčîíŕëüíŕ˙ ěîäĺëü áîđňîâîăî ęîěďëĺęńŕ íŕâĺäĺíč˙ č ďîńŕäęč â íîňŕöčč IDEF0.  ďđîöĺńńĺ ńîçäŕíč˙ ôóíęöčîíŕëüíîé ěîäĺëč îďčńŕíű îńíîâíűĺ ďđîöĺńńű, âűďîëí˙ĺěűĺ ęîěďëĺęńîě âî âđĺě˙ ńőîäŕ ń îđáčňű č ďîńŕäęč.  đĺçóëüňŕňĺ đŕáîňű ďîëó÷ĺíî îďčńŕíčĺ ďđîöĺäóđ, âűďîëí˙ĺěűő ěíîăîôóíęöčîíŕëüíűě áîđňîâűě ęîěďëĺęńîě íŕâĺäĺíč˙ č ďîńŕäęč ęîńěč÷ĺńęîăî ëĺňŕňĺëüíîăî ŕďďŕđŕňŕ. Ďîńňđîĺíŕ ďđčęëŕäíŕ˙ ôóíęöčîíŕëüíŕ˙ ěîäĺëü óđîâí˙ «to-be», îńíîâŕííŕ˙ íŕ čńďîëüçîâŕíčč ęîěďëĺęńíîăî ďîäőîäŕ. Ďđĺäëŕăŕĺěűé ęîěďëĺęńíűé ďîäőîä îđčĺíňčđîâŕí íŕ ńîâěĺńňíîĺ čńďîëüçîâŕíčĺ äŕííűő îň âńĺő áîđňîâűő óńňđîéńňâ, ęŕę îńíîâíîé č äóáëčđóţůĺé číôîđěŕöčč. Ňŕęîé ďîäőîä ďîçâîë˙ĺň ďîâűńčňü ňî÷íîńňü č íŕäĺćíîńňü ďđîöĺäóđű ďîńŕäęč.
Ęëţ÷ĺâűĺ ńëîâŕ:
Áîđňîâîé ěíîăîôóíęöčîíŕëüíűé ęîěďëĺęń, âčçóŕëüíîĺ íŕâĺäĺíčĺ, ęîěďëĺęńíűé ďîäőîä, íŕâčăŕöč˙ ĘËŔ, íŕâĺäĺíčĺ ĘËŔ, ďîńŕäęŕ ĘËŔ, ôóíęöčîíŕëüíŕ˙ ěîäĺëü, îďňč÷ĺńęčé ďĺëĺíăŕňîđ, îďňč÷ĺńęŕ˙ îáđŕáîňęŕ, ěŕëűĺ ňĺëŕ
Abstract: The basic requirements for the on-board complex of the spacecraft for purposes of guidance and landing on small bodies of the solar system are formulated in the work. The main tasks of the landing and landing vehicles are braking and approaching the surface of the celestial body, landing, working on its surface, possibly taking off from the surface to deliver the returned vehicle to the ground. Providing high requirements to the accuracy and reliability of the on-board guidance and landing system, an actual solution is proposed. Using the traditional approach to the modeling of processes and systems, a functional model of the onboard guidance and landing system in IDEF0 notation was created. In the process of creating a functional model, the main processes performed by the complex during descent from orbit and landing are described. As a result of the work, a description of the procedures performed by the multifunctional on-board guidance and landing system of the spacecraft has been obtained. An applied functional model of the "to-be" level was constructed, based on the use of an integrated approach. The proposed integrated approach is focused on the sharing of data from all on-board devices, both basic and backup information. This approach allows to increase the accuracy and reliability of the landing procedure.
Keywords: Onboard multifunctional environment, visual guidance, integrated approach, navigation of the spacecraft, guidance of the spacecraft, landing a spacecraft, functional model, optical direction finder, optical processing, small bodies
Ęđŕňęčé ŕíŕëčç ďđîáëĺěű ďîńňđîĺíč˙ ěíîăîôóíęöčîíŕëüíîăî áîđňîâîăî ęîěďëĺęńŕ íŕâĺäĺíč˙ č ďîńŕäęč.
Ďđîöĺäóđŕ ńďóńęŕ č ďîńŕäęč îäčí čç ńŕěűő âŕćíűő č îňâĺňńňâĺííűő ýňŕďîâ ęîńěč÷ĺńęîăî ďîëĺňŕ, ňîëüęî óńďĺříîĺ ĺăî âűďîëíĺíčĺ ďîçâîëčň đĺřčňü ďîńňŕâëĺííűĺ çŕäŕ÷č. Ďđč đŕçđŕáîňęĺ äŕííîé ěîäĺëč áűëî ďđčí˙ňî îăđŕíč÷ĺíčĺ, ÷ňî đŕńńěŕňđčâŕĺňń˙ ďîńŕäęŕ íŕ ěŕëűĺ ňĺëŕ ńîëíĺ÷íîé ńčńňĺěű, ęîňîđűĺ îáëŕäŕţň íĺçíŕ÷čňĺëüíîé ńčëîé ďđčň˙ćĺíč˙, ŕ ŕňěîńôĺđŕ îňńóňńňâóĺň. Ńőĺěű ńďóńęŕ ďđĺäďîëŕăŕĺň čńďîëüçîâŕíčĺ đĺŕęňčâíűő äâčăŕňĺëüíűő óńňŕíîâîę, äë˙ ęîđđĺęöčč ěŕí¸âđŕ ńďóńęŕ č ďîńŕäęč ĘËŔ.
Ďîńŕäęŕ íŕ ěŕëűĺ ňĺëŕ ńîëíĺ÷íîé ńčńňĺěű íĺîáőîäčěŕ, ęŕę ěčíčěóě, ďî äâóě ďđč÷číŕě. Ďĺđâŕ˙ ďđč÷číŕ – čçó÷ĺíčĺ ńîńňŕâŕ ňŕęčő ňĺë. Ńîăëŕńíî îáůĺďđčí˙ňîé ăčďîňĺçĺ, íĺęîňîđűĺ čç ěŕëűő ňĺë ńëîćĺíű čç ďĺđâîđîäíîé ěŕňĺđčč, ňîé ńŕěîé, čç ęîňîđîé îáđŕçîâŕëŕńü ńîëíĺ÷íŕ˙ ńčńňĺěŕ. Ňŕęčě îáđŕçîě čő čçó÷ĺíčĺ äîëćíî äîďîëíčňü çíŕíč˙ íŕó÷íîăî ńîîáůĺńňâŕ č ďîíčěŕíčĺ ďđîöĺńńŕ ôîđěčđîâŕíč˙ íŕřĺăî ěčđŕ. Âňîđŕ˙ ďđč÷číŕ – îňâĺäĺíčĺ óăđîćŕţůčő ňĺë, ęîňîđűĺ ěîăóň ńňîëęíóňüń˙ ń Çĺěëĺé, âűçâŕâ ŕďîęŕëčďńčń [1-7].  îáîčő ńëó÷ŕ˙ő, íĺîáőîäčěŕ ëčáî ďîńŕäęŕ íŕ ďîâĺđőíîńňü, ëčáî íŕâĺäĺíčĺ ĘËŔ âďëîňíóţ ę ďîâĺđőíîńňč ĚŇŃŃ [3,4,8]. Ęŕę óćĺ îňěĺ÷ŕëîńü, ďîńŕäęŕ ˙âë˙ĺňń˙ îäíčě čç ńŕěűő ńëîćíűő ýňŕďîâ ęîńěč÷ĺńęîé ěčńńčč. Ýňî, â ďĺđâóţ î÷ĺđĺäü ńâ˙çŕíî ń áîëüřčě óäŕëĺíčĺě îň Çĺěëč. Čç-çŕ îăđŕíč÷ĺííîé ńęîđîńňč đŕńďđîńňđŕíĺíč˙ ńâĺňŕ đó÷íîĺ óďđŕâëĺíčĺ ďđîöĺäóđîé ďîńŕäęč ń Çĺěëč â đĺŕëüíîě ěŕńřňŕáĺ âđĺěĺíč íĺâîçěîćíî. Ňŕęčě îáđŕçîě, ďîńŕäęŕ äîëćíŕ âűďîëí˙ňüń˙ ŕâňîíîěíî [9-19]. Ę ěĺńňó ďîńŕäęč ŕďďŕđŕňŕ ďđĺäú˙âë˙ţňń˙ ćĺńňęčĺ ňđĺáîâŕíč˙ ďî îđčĺíňŕöčč ŕíňĺíí ńâ˙çč äë˙ ęîíňŕęňŕ ń Çĺěëĺé, îńâĺů¸ííîńňč, äë˙ çŕđ˙äŕ áŕňŕđĺé, ŕ ňŕęćĺ đĺëüĺôó, äë˙ ňîăî, ÷ňîáű ŕďďŕđŕň ďđč ďîńŕäęĺ íĺ ďĺđĺâĺđíóëń˙. Ňŕęčě îáđŕçîě, ňđĺáîâŕíč˙ ę ňî÷íîńňč ďîńŕäęč ńëĺäóĺň ďđčçíŕňü âűńîęčěč, ÷ňî óńëîćí˙ĺň çŕäŕ÷ó ŕâňîíîěíîăî íŕâĺäĺíč˙ č ďîńŕäęč [20].
Îăđŕíč÷ĺííŕ˙ ěîůíîńňü áîđňîâűő âű÷čńëčňĺëüíűő đĺńóđńîâ íĺ ďîçâîë˙ĺň, ďî ęđŕéíĺé ěĺđĺ íŕ äŕííűé ěîěĺíň, âűďîëíčňü âńĺ ďđîöĺäóđű ďîëíîńňüţ ŕâňîěŕňč÷ĺńęč. Ňđĺáóĺňń˙ âěĺřŕňĺëüńňâî â đŕáîňó öĺíňđŕ óďđŕâëĺíč˙ ďîëĺňŕěč (ÖÓĎ) [8,21]. Îäíŕęî çŕęëţ÷čňĺëüíűé ýňŕď ďîńŕäęč, ęîăäŕ ĘËŔ íŕ÷íĺň ńőîäű ń ňđŕĺęňîđčč čńęóńńňâĺííîăî ńďóňíčęŕ (ČŃ) ĚŇŃŃ č ďîńŕäęó íŕ ĺăî ďîâĺđőíîńňü áóäĺň âűďîëí˙ňüń˙ ďîëíîńňüţ ŕâňîíîěíî. Äë˙ ďîâűřĺíč˙ ňî÷íîńňč ýňîăî ýňŕďŕ ďđĺäëŕăŕĺňń˙ čńďîëüçîâŕňü îďňč÷ĺńęčé ďĺëĺíăŕňîđ â ńîńňŕâĺ áîđňîâîăî ęîěďëĺęńŕ íŕâĺäĺíč˙ č ďîńŕäęč. Ďđčíöčď äĺéńňâč˙ ďĺëĺíăŕňîđŕ îńíîâŕí íŕ îďňč÷ĺńęîé îáđŕáîňęĺ ďđîńňđŕíńňâĺííîé äâóőěĺđíîé číôîđěŕöčč äë˙ ďîńňî˙ííîăî îďđĺäĺëĺíč˙ óăëîâűő ęîîđäčíŕň ěĺńňŕ ďîńŕäęč ďóňĺě đŕńďîçíŕâŕíč˙ îáđŕçîâ [8,21].
Äë˙ ďîâűřĺíč˙ íŕäĺćíîńňč çŕęëţ÷čňĺëüíîăî ýňŕďŕ ďîńŕäęč ŕâňîđŕěč ďđĺäëŕăŕĺňń˙ čńďîëüçîâŕňü ęîěďëĺęńíóţ îáđŕáîňęó äŕííűő îň âńĺő áîđňîâűő óńňđîéńňâ. Äë˙ đĺřĺíč˙ ďîńňŕâëĺííűő çŕäŕ÷ ďđĺäëŕăŕĺňń˙ ěíîăîôóíęöčîíŕëüíűé áîđňîâîé ęîěďëĺęń íŕâĺäĺíč˙ č ďîńŕäęč (ÁĘÍĎ) ĘËŔ. ÁĘÍĎ â đĺćčěĺ «Ďîńŕäęŕ» îńóůĺńňâë˙ĺň óďđŕâëĺíčĺ đŕáîňîé áîđňîâűő óńňđîéńňâ, äë˙ đĺřĺíč˙ íŕâčăŕöčîííűő çŕäŕ÷, ŕâňîíîěíóţ îáđŕáîňęó ďîëó÷ŕĺěîé číôîđěŕöčĺé č îáěĺí äŕííűěč ďđč ńďóńęĺ ĘËŔ íŕ ďîâĺđőíîńňü ĚŇŃŃ. Íŕâčăŕöčîííűĺ-ďîńŕäî÷íűĺ çŕäŕ÷č âęëţ÷ŕţň: óňî÷íĺíčĺ îđáčňű ęîńěč÷ĺńęîăî ŕďďŕđŕňŕ ĘËŔ íŕ ňđŕńńĺ ďĺđĺëĺňŕ č ďđč ěŕíĺâđčđîâŕíčč íŕ ňđŕĺęňîđčč čńęóńńňâĺííîăî ńďóňíčęŕ ěŕëîăî ňĺëŕ ńîëíĺ÷íîé ńčńňĺěű; óňî÷íĺíčĺ ňđŕĺęňîđčč ĚŇŃŃ; âűáîđ đŕéîíŕ ďîńŕäęč íŕ ĚŇŃŃ; íŕâčăŕöčîííŕ˙ ďîääĺđćęŕ ďîńŕäęč; čçěĺđĺíč˙ đŕńńňî˙íč˙ äî ďîâĺđőíîńňč č ńîńňŕâë˙ţůčĺ îňíîńčňĺëüíîé ńęîđîńňč ĘËŔ. Ďîëó÷ĺííűĺ â ďđîöĺńńĺ ńďóńęŕ č ďîńŕäęč äŕííűĺ äîëćíű îáĺńďĺ÷čâŕňü öĺëűé ęîěďëĺęń çŕäŕ÷, âęëţ÷ŕ˙: óňî÷íĺíčĺ ěîäĺëč ôčăóđű ĚŇŃŃ, ńîçäŕíčĺ ęŕđň đĺëüĺôŕ; óňî÷íĺíčĺ ďŕđŕěĺňđîâ ńîáńňâĺííîăî âîçěóůĺííîăî äâčćĺíč˙ ěŕëîăî ňĺëŕ ńîëíĺ÷íîé ńčńňĺěű č ňđŕĺęňîđčč ĺăî äâčćĺíč˙, č đ˙ä äđóăčő íŕó÷íűő çŕäŕ÷ [9-20].
Ďđîĺęňčđîâŕíčĺ ńčńňĺěű â íîňŕöčč IDEF0. Ěîäĺëčđîâŕíčĺ ęîíňĺęńňíîé äčŕăđŕěěű.
Îáúĺęňîě âűńňóďŕĺň áîđňîâîé ęîěďëĺęń íŕâĺäĺíč˙ č ďîńŕäęč ĘËŔ. Đŕńńěŕňđčâŕţňń˙ ďđîöĺńńű, ďđîčńőîä˙ůčĺ âíóňđč íĺăî. Îńíîâíŕ˙ çŕäŕ÷ŕ îďčńŕíčĺ ďđîöĺńńŕ ďîńŕäęč ĘËŔ íŕ ďîâĺđőíîńňü ĚŇŃŃ äë˙ ńîçäŕíč˙ ôóíęöčîíŕëüíîé ěîäĺëč ÁĘÍĎ [22]. Äë˙ äîńňčćĺíč˙ ýňîé çŕäŕ÷č íĺîáőîäčěî îďčńŕňü ďđîöĺäóđó íŕâčăŕöčč ĘËŔ íŕ îđáčňĺ čńęóńńňâĺííîăî ńďóňíčęŕ ĚŇŃŃ, äë˙ äĺňŕëüíîăî čçó÷ĺíč˙ ďŕđŕěĺňđîâ ĺăî äâčćĺíč˙ č ńîçäŕíč˙ öčôđîâîé ěîäĺëč ěŕëîăî ňĺëŕ. Ďîëó÷ĺííűĺ íŕ ýňîě ýňŕďĺ äŕííűĺ íĺîáőîäčěű äë˙ óňî÷íĺíč˙ ďđîöĺäóđű íŕâĺäĺíč˙ č ďîńŕäęč ĘËŔ. Ďđč ęîđđĺęňčđîâęĺ ńâĺäĺíčé îá číňĺđĺńóţůĺě ĚŇŃŃ č ĺăî äĺňŕëüíîé ńúĺěęĺ řčđîęî çŕäĺéńňâîâŕí ÁĘÍĎ, ÷ňî äĺëŕĺň îďčńŕíčĺ ýňčő ďđîöĺäóđ íĺîňúĺěëĺěîé ÷ŕńňüţ íŕńňî˙ůĺăî čńńëĺäîâŕíč˙. Íŕ îńíîâĺ ŕíŕëčçŕ, âűďîëíĺííîăî â đŕěęŕő íŕńňî˙ůĺé đŕáîňű, áűëč îďđĺäĺëĺííű ââîäíűĺ äŕííűĺ ěîäĺëčđóĺěîăî ďđîöĺńńŕ:
1) ďî óďđŕâëĺíčţ:
• Ďîëĺňíîĺ çŕäŕíčĺ;
• Çŕäŕ÷č ěčńńčč;
2) ďî âőîäó:
• Ňđŕĺęňîđč˙ ĘËŔ (áŕëëčńňč÷ĺńęčĺ äŕííűĺ);
• Ňđŕĺęňîđč˙ čńńëĺäóĺěîăî ňĺëŕ;
3) ďî ěĺőŕíčçěó:
• ÁĘÍĎ (Áîđňîâîé ęîěďëĺęń íŕâĺäĺíč˙ č ďîńŕäęč);
• ÖÓĎ (öĺíňđó óďđŕâëĺíč˙ ďîëĺňŕěč);
3) ďî âűőîäó:
• Îň÷ĺň î ďîńŕäęĺ ĘËŔ.
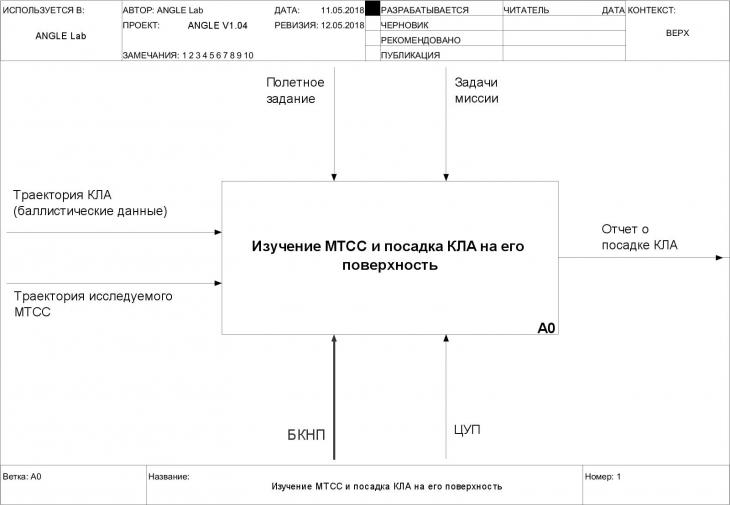
Đčńóíîę 1 – Ęîíňĺęńňíŕ˙ äčŕăđŕěěŕ ďđîöĺäóđű čçó÷ĺíč˙ ěŕëîăî ňĺëŕ č ďîńŕäęč ĘËŔ íŕ ĺăî ďîâĺđőíîńňü â íîňŕöčč IDEF0.
Îďčńŕííűĺ âűřĺ ââîäíűĺ ďŕđŕěĺňđű íŕ óđîâíĺ ęîíňĺęńňíîé äčŕăđŕěěű Ŕ-0 áűëč ďđĺäńňŕâëĺíű â âčäĺ ńëĺäóţůčő ăđŕíč÷íűő ńâ˙çĺé äë˙ ôóíęöčîíŕëüíîăî áëîęŕ čçó÷ĺíčĺ ěŕëîăî ňĺëŕ ńîëíĺ÷íîé ńčńňĺěű (ĚŇŃŃ) č ďîńŕäęŕ ęîńěč÷ĺńęîăî ëĺňŕňĺëüíîăî ŕďďŕđŕňŕ (ĘËŔ) íŕ ĺăî ďîâĺđőíîńňü, čçîáđŕćĺííîăî íŕ đčńóíęĺ 1.  ńîîňâĺňńňâčč ń ňđĺáîâŕíč˙ěč ěĺňîäîëîăčč IDEF0 áűëŕ âűďîëíĺíŕ äŕëüíĺéřŕ˙ äĺęîěďîçčöč˙ îďčńűâŕĺěűő ďđîöĺńńîâ, đĺçóëüňŕňű ęîňîđîé ďđĺäńňŕâëĺíű íŕ đčńóíęĺ 2.
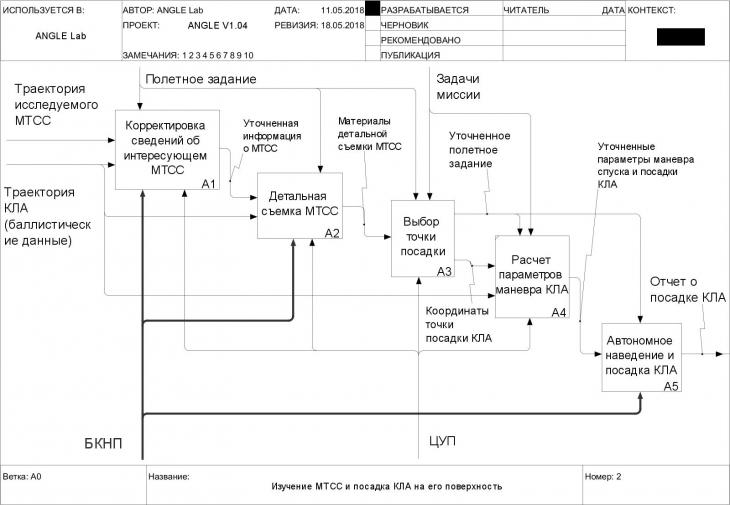
Đčńóíîę 2 – Äčŕăđŕěěŕ äĺęîěďîçčöčč ęîíňĺęńňíîé äčŕăđŕěěű «Ďîńŕäęŕ ĘËŔ íŕ ďîâĺđőíîńňü ĚŇŃŃ» â íîňŕöčč IDEF0.
Íŕ äčŕăđŕěěĺ óđîâí˙ Ŕ0 äĺęîěďîçčöčč ôóíęöčîíŕëüíîăî áëîęŕ čçó÷ĺíčĺ ěŕëîăî ňĺëŕ ńîëíĺ÷íîé ńčńňĺěű č ďîńŕäęŕ ęîńěč÷ĺńęîăî ëĺňŕňĺëüíîăî ŕďďŕđŕňŕ íŕ ĺăî ďîâĺđőíîńňü îáîçíŕ÷ĺíű ďđîöĺńńű č ôóíęöčîíŕëüíűĺ áëîęč âűďîëí˙ĺěűĺ â đŕěęŕő ďđîöĺäóđű:
· Ęîđđĺęňčđîâęŕ ńâĺäĺíčé îá číňĺđĺńóţůĺě ĚŇŃŃ, (Ŕ1);
· Äĺňŕëüíŕ˙ ńúĺěęŕ ĚŇŃŃ, (Ŕ2);
· Âűáîđ ňî÷ęč ďîńŕäęč, (Ŕ3);
· Đŕń÷ĺň ďŕđŕěĺňđîâ ěŕíĺâđŕ ďîńŕäęč ĘËŔ, (Ŕ4);
· Ŕâňîíîěíîĺ íŕâĺäĺíčĺ č ďîńŕäęŕ ĘËŔ, (Ŕ5).
Çŕäŕ÷ĺé ˙âë˙ĺňń˙ ńîçäŕíčĺ ôóíęöčîíŕëüíîé ěîäĺëč áîđňîâîăî ęîěďëĺęńŕ, îńóůĺńňâë˙ţůĺăî ďđîöĺäóđó ŕâňîíîěíîăî íŕâĺäĺíč˙ č ďîńŕäęč ĘËŔ, íŕ ďîńëĺäíĺě ýňŕďĺ, ďîńëĺ ńőîäŕ ń ňđŕĺęňîđčč ČŃ ĚŇŃŃ, ńďóńęĺ č ďîńŕäęĺ íŕ ďîâĺđőíîńňü ěŕëîăî ňĺëŕ. Îńíîâíŕ˙ çŕäŕ÷ŕ ÁĘÍĎ ďîâűřĺíčĺ ňî÷íîńňč č íŕäĺćíîńňč ďđîöĺńńŕ ŕâňîíîěíîé ďîńŕäęč. Đóęîâîäńňâó˙ńü ďđčâĺäĺííűěč đŕíĺĺ ńîîáđŕćĺíč˙ěč č îăđŕíč÷ĺíč˙ěč, áűëŕ ďîńňđîĺíŕ äčŕăđŕěěŕ íŕ ęîňîđîé îňîáđŕćŕţňń˙ ďđîöĺńńű č ńâ˙çč ěĺćäó íčěč.
Ďĺđâűě ďđîöĺńńîě, îďđĺäĺëĺííűě íŕ îńíîâĺ ŕíŕëčçŕ ďđĺäěĺňíîé îáëŕńňč, ˙âë˙ĺňń˙ Ęîđđĺęňčđîâęŕ ńâĺäĺíčé îá číňĺđĺńóţůĺě íĺáĺńíîě ňĺëĺ, ęîňîđűé â ďđîöĺńńĺ ôóíęöčîíčđîâŕíč˙ ďîëó÷ŕĺň â ęŕ÷ĺńňâĺ čńőîäíűő äŕííűő ňđŕĺęňîđčţ č äđóăčĺ ďŕđŕěĺňđű äâčćĺíč˙ ĚŇŃŃ. Ýňč čńőîäíűĺ äŕííűĺ ˙âë˙ţňń˙ ďĺđâč÷íűěč č ěîăóň áűňü íĺäîńňŕňî÷íî ňî÷íűěč äë˙ îńóůĺńňâëĺíč˙ âńĺő ýňŕďîâ ęîńěč÷ĺńęîé ěčńńčč. Ďîčńę ěŕëűő ňĺë ńîëíĺ÷íîé ńčńňĺěű, ęŕę ďđŕâčëî îńóůĺńňâë˙ĺňń˙ íŕ Çĺěëĺ, ňđŕäčöčîííűěč ěĺňîäŕěč, íŕďđčěĺđ, ńđŕâíĺíčĺě ôîňîăđŕôč÷ĺńęčő čçîáđŕćĺíčé çâĺçäíîăî íĺáŕ. Ďîńëĺ îáíŕđóćĺíč˙ ĚŇŃŃ íŕ ôîňîăđŕôč÷ĺńęčő čçîáđŕćĺíč˙ő, ń ďîěîůüţ ńďĺöčŕëüíűő ŕëăîđčňěîâ âű÷čńë˙ţňń˙ ďŕđŕěĺňđű ňđŕĺęňîđčč äâčćĺíč˙ ňŕęčő ňĺë. Ďđč ýňîě íĺâîçěîćíî ó÷ĺńňü đ˙ä îáúĺęňčâíűő ďŕđŕěĺňđîâ, čńęŕćŕţůčő đŕń÷ĺňíűĺ çíŕ÷ĺíč˙ ďŕđŕěĺňđîâ, ňŕęčő ęŕę: âëč˙íčĺ ŕňěîńôĺđű, âîçěóůŕţůčĺ âîçäĺéńňâč˙ îň äđóăčő ěŕëűő č áîëüřčő ňĺë ńîëíĺ÷íîé ńčńňĺěű, ńîáńňâĺííîĺ âîçěóůĺííîĺ äâčćĺíčĺ, íŕďđčěĺđ, âđŕůĺíčĺ č ň.ä. Ňî÷íîńňč ýňčő ďŕđŕěĺňđîâ, îäíŕęî, äîńňŕňî÷íî äë˙ ňîăî, ÷ňî ńáëčçčňü ĘËŔ ń čçó÷ŕĺěűě ňĺëîě íŕńňîëüęî, ÷ňîáű ńňŕëî âîçěîćíűě äŕëüíĺéřĺĺ äĺňŕëüíîĺ čçó÷ĺíčĺ ĚŇŃŃ.  ďđîöĺńńĺ äĺňŕëüíîăî čçó÷ĺíč˙ ĚŇŃŃ óňî÷í˙ţňń˙ ďŕđŕěĺňđű äâčćĺíč˙ ĚŇŃŃ, ŕ ňŕęćĺ âďĺđâűĺ îďđĺäĺë˙ţňń˙ ňŕęčĺ ďŕđŕěĺňđű ěŕëîăî ňĺëŕ ńîëíĺ÷íîé ńčńňĺěű, ęŕę ĺăî đŕçěĺđű, ôîđěŕ, îáúĺě, ěŕńńŕ, ďëîňíîńňü č äđóăčĺ ďŕđŕěĺňđű, ęîňîđűĺ ňđĺáóĺňń˙ ó÷čňűâŕňü ďđč íŕâĺäĺíčč č ďîńŕäęĺ ĘËŔ. Ďŕđŕěĺňđű, âęëţ÷ŕ˙ ňđŕĺęňîđčţ äâčćĺíč˙ ěŕëîăî ňĺëŕ óňî÷í˙ţňń˙ áîđňîâűěč ńđĺäńňâŕěč ĘËŔ, â îńíîâíîě âčçóŕëüíűěč. Ďđč ýňîě íĺîáőîäčěî đŕńďîëŕăŕňü ňî÷íűěč äŕííűěč î ďîëîćĺíčč ńŕěîăî ĘËŔ. Çŕäŕ÷ŕ ňî÷íîăî îďđĺäĺëĺíč˙ ďŕđŕěĺňđîâ âîçëîćĺíŕ íŕ ÁĘÍĎ, â ÷ŕńňíîńňč íŕ çâĺçäíűĺ äŕň÷čęč, ôîňîęŕěĺđű, číĺđöčŕëüíűĺ äŕň÷čęč č âű÷čńëčňĺëüíűĺ ńđĺäńňâŕ, ęîňîđűĺ âőîä˙ň â ĺăî ńîńňŕâ.  ýňîé ńčňóŕöčč ÁĘÍĎ âűńňóďŕĺň â đîëč ěĺőŕíčçěŕ, ďđîĺęňčđóĺěîăî ôóíęöčîíŕëüíîăî áëîęŕ. Ďđîöĺäóđű č ŕëăîđčňěű đŕáîňű đŕńńěŕňđčâŕĺěîăî ôóíęöčîíŕëüíîăî áëîęŕ âűďîëí˙ţňń˙ â ńîîňâĺňńňâčč ń äîęóěĺíňŕěč ďîëĺňíîăî çŕäŕíč˙, ęîňîđîĺ âűńňóďŕĺň â đîëč óďđŕâëĺíč˙. Ďîä ďîëĺňíűě çŕäŕíčĺě â đŕáîňĺ ďîäđŕçóěĺâŕĺňń˙ îďčńŕíčĺ ŕëăîđčňěîâ č ďđŕâčë âűďîëíĺíč˙ đŕçëč÷íűő ýňŕďîâ č îňäĺëüíűő ďđîöĺäóđ â đŕěęŕő ěčńńčč.  đĺçóëüňŕň ôóíęöčîíčđîâŕíč˙ áëîęŕ íŕ âűőîäĺ ďîëó÷ŕĺě Óňî÷íĺííóţ číôîđěŕöčţ î ěŕëîě ňĺëĺ. Çŕěĺňčě, ÷ňî â ýňîě áëîęĺ âűäĺëĺíî ďîëó÷ĺíčĺ č óňî÷íĺíčĺ ňĺő ďŕđŕěĺňđîâ, ęîňîđűĺ âëč˙ţň íŕ áŕëëčńňčęó ěŕíĺâđŕ ďîńŕäęč ĘËŔ íŕ ďîâĺđőíîńňü čçó÷ŕĺěîăî ňĺëŕ.
Äë˙ ńîçäŕíč˙ öčôđîâîé ěîäĺëč ĚŇŃŃ, ŕ ňŕęćĺ ęŕđň č âűáîđŕ ňî÷ęč ďîńŕäęč ĘËŔ ďđîčçâîäčňń˙ äĺňŕëüíŕ˙ ôîňîńúĺěęŕ čçó÷ŕĺěîăî ěŕëîăî ňĺëŕ ńîëíĺ÷íîé ńčńňĺěű. Ńîîňâĺňńňâĺííî ôóíęöčîíŕëüíűé áëîę «Âűďîëíĺíčĺ äĺňŕëüíîé ńúĺěęč ĚŇŃŃ», đŕáîňŕĺň čńďîëüçó˙ óňî÷íĺííóţ číôîđěŕöčţ î íĺáĺńíîě ňĺëĺ, ďîëó÷ĺííóţ čç ôóíęöčîíŕëüíîăî áëîęŕ Ŕ1, ŕ ňŕęćĺ čńďîëüçóţ Ňđŕĺęňîđč˙ ĘËŔ (áŕëëčńňč÷ĺńęčĺ äŕííűĺ), ęîňîđűĺ â ńâîţ î÷ĺđĺäü ˙âë˙ţňń˙ ăđŕíč÷íîé ńâ˙çüţ.  ęŕ÷ĺńňâĺ óďđŕâëĺíč˙ ôóíęöčîíŕëüíîăî áëîęŕ čńďîëüçóĺňń˙ ďîëĺňíîĺ çŕäŕíčĺ, â ęŕ÷ĺńňâĺ ěĺőŕíčçěŕ Áîđňîâîé ęîěďëĺęń íŕâĺäĺíč˙ č ďîńŕäęč (ÁĘÍĎ), ŕ ňŕęćĺ ÖÓĎ. Ďîä đŕáîňîé öĺíňđŕ óďđŕâëĺíč˙ ďîëĺňŕěč ďîäđŕçóěĺâŕĺňń˙ đŕáîňŕ ęîěŕíäű ó÷ĺíűő, âîâëĺ÷ĺííűő â ěčńńčţ. Áîđňîâűő âű÷čńëčňĺëüíűő ńđĺäńňâ íĺäîńňŕňî÷íî, äë˙ ńîçäŕíč˙ âńĺő íĺîáőîäčěűő ěŕňĺđčŕëîâ, â ňîě ÷čńëĺ öčôđîâîé ňđĺőěĺđíîé ěîäĺëč ĚŇŃŃ, ęŕđň č ň.ä. Čěĺííî ďîýňîěó ýňó ÷ŕńňü đŕáîňű öĺëĺńîîáđŕçíî âűďîëí˙ňü ďđč ďîěîůč íŕçĺěíűő ńëóćá.
Ńëĺäóţůčě ôóíęöčîíŕëüíűě áëîęîě ďđîöĺäóđű ďîńŕäęč, ˙âë˙ĺňń˙ Âűáîđ ňî÷ęč ďîńŕäęč. Ďîńëĺ ńîçäŕíč˙ âńĺő ďđîńňđŕíńňâĺííűő (ňîďîăđŕôč÷ĺńęčő) ěŕňĺđčŕëîâ âűáčđŕĺňń˙ ěĺńňî ďîńŕäęč, ęîňîđîĺ îňâĺ÷ŕĺň âńĺě ňđĺáîâŕíč˙ě, ďî îđčĺíňŕöčč íŕ Çĺěëţ, îńâĺůĺííîńňč č îňńóňńňâčţ îďŕńíűő ôîđě đĺëüĺôŕ, ęîňîđűĺ ěîăóň áűňü îďŕńíű äë˙ ĘËŔ ďđč ďîńŕäęĺ. Âűáîđ ňî÷ęč ďîńŕäęč, ŕ ňŕęćĺ đĺçĺđâíűő ňî÷ĺę ďîńŕäęč ďđîčçâîäčňń˙ ó÷ĺíűěč đŕçíűő ńďĺöčŕëüíîńňĺé íŕ Çĺěëĺ, ďîýňîěó číńňđóěĺíňîě âűńňóďŕĺň öĺíňđó óďđŕâëĺíč˙ ďîëĺňŕěč (ÖÓĎ), ęŕę íĺęîĺ îáîáůĺíčĺ íŕçĺěíîé ęîěŕíäű ěčńńčč. Ďî đĺçóëüňŕňŕě ýňîé đŕáîňű, ďîńëĺ ňîăî, ęŕę âűáđŕíű îńíîâíŕ˙ č đĺçĺđâíűĺ ňî÷ęč ďîńŕäęč, čő ęîîđäčíŕňű çŕęëŕäűâŕţňń˙ ń Çĺěëč â áîđňîâîé ęîěďëĺęń íŕâĺäĺíč˙ č ďîńŕäęč ń öĺëüţ ęîđđĺęöčč ďîëĺňíîăî çŕäŕíč˙ č ďĺđĺäŕ÷č ěŕňĺđčŕëîâ.  ęŕ÷ĺńňâĺ ěĺőŕíčçěŕ čńďîëüçóţňń˙ öĺíňđ óďđŕâëĺíč˙ ďîëĺňŕěč (ÖÓĎ) ńîâěĺńňíî ń ÁĘÍĎ. Ďîëíîńňüţ ŕâňîěŕňč÷ĺńęč ńęîđđĺęňčđîâŕňü ďîëĺňíîĺ çŕäŕíčĺ čńďîëüçó˙ ňîëüęî ÁĘÍĎ íĺâîçěîćíî, ďîýňîěó čńďîëüçóţňń˙ âńĺ âű÷čńëčňĺëüíűĺ ěîůíîńňč íŕ Çĺěëĺ. Îńňŕíîâčěń˙ áîëĺĺ ďîäđîáíî íŕ ýňîé ďđîöĺäóđĺ. Óňî÷íĺííîĺ ďîëĺňíîĺ çŕäŕíčĺ ôŕęňč÷ĺńęč ńîçäŕĺňń˙ íŕ Çĺěëĺ č çŕęëŕäűâŕĺňń˙ â áîđňîâîé ęîěďëĺęń íŕâĺäĺíč˙ č ďîńŕäęč öĺíňđîě óďđŕâëĺíč˙ ďîëĺňŕěč. Çŕěĺňčě, ÷ňî čńďîëüçîâŕíčĺ ÖÓĎ íĺ ďđîňčâîđĺ÷čň îáůĺé ęîíöĺďöčč çŕëîćĺííîé â äŕííîé đŕáîňĺ. Ŕâňîíîěíî âűďîëí˙ĺňń˙ íŕčáîëĺĺ îňâĺňńňâĺííűé ýňŕď ďîńŕäęč – ńőîä ń îđáčňű čńęóńńňâĺííîăî ńďóňíčęŕ ĚŇŃŃ č ďîńŕäęŕ â ňî÷ęĺ ń çŕđŕíĺĺ îďđĺäĺëĺííűěč ęîîđäčíŕňŕěč.  ńâîţ î÷ĺđĺäü öĺëüţ č đĺçóëüňŕňîě ôóíęöčîíčđîâŕíč˙ áëîęŕ îďđĺäĺëĺíčĺ ęîîđäčíŕň ďîńŕäęč, ˙âë˙ţňń˙ ďđîńňđŕíńňâĺííűĺ äŕííűĺ – ęîîđäčíŕňű ňî÷ęč ďîńŕäęč ĘËŔ. Ęîîđäčíŕňű ňî÷ęč ďîńŕäęč čńďîëüçóţňń˙ äë˙ äŕëüíĺéřĺăî đŕń÷ĺňŕ ďŕđŕěĺňđîâ áŕëëčńňč÷ĺńęîăî ěŕíĺâđŕ ďîńŕäęč ęîńěč÷ĺńęîăî ëĺňŕňĺëüíîăî ŕďďŕđŕňŕ čëč ńďóńęŕĺěîăî ŕďďŕđŕňŕ. Ňŕęčě îáđŕçîě, â ěîäĺëü íĺîáőîäčěî ââĺńňč ôóíęöčîíŕëüíűé áëîę Đŕń÷ĺň ďŕđŕěĺňđîâ ěŕíĺâđŕ ďîńŕäęč ĘËŔ. Âíóňđč ýňîăî áëîęŕ ěîäĺëč âűďîëí˙ĺňń˙ đŕń÷ĺň áŕëëčńňč÷ĺńęčő ďŕđŕěĺňđîâ äë˙ ńőîäŕ ń îđáčňű čńęóńńňâĺííîăî ńďóňíčęŕ ěŕëîăî ňĺëŕ č ďîńŕäęč ĘËŔ, äë˙ ýňîăî čńďîëüçóĺňń˙ ńęîđđĺęňčđîâŕííîĺ ďîëĺňíîĺ çŕäŕíčĺ, â ÷ŕńňíîńňč, ęîîđäčíŕňű ňî÷ęč ďîńŕäęč, ďîëó÷ĺííűĺ čç ôóíęöčîíŕëüíîăî áëîęŕ Ŕ2. Îăđŕíč÷ĺííűĺ âîçěîćíîńňč áîđňîâűő đĺńóđńîâ ňđĺáóţň čńďîëüçîâŕňü â ęŕ÷ĺńňâĺ ěĺőŕíčçěŕ â äŕííîě áëîęĺ ÖÓĎ. Öĺëüţ č đĺçóëüňŕňîě ôóíęöčîíčđîâŕíč˙ äŕííîăî áëîęŕ, ˙âë˙ţňń˙ Óňî÷íĺííŕ˙ ňđŕĺęňîđč˙ ĘËŔ.
Ôóíęöčîíŕëüíűé áëîę «Íŕâĺäĺíčĺ č ďîńŕäęŕ ĘËŔ» îďčńűâŕĺň ďđîöĺäóđó ŕâňîíîěíîăî íŕâĺäĺíč˙ č ďîńŕäęč ĘËŔ. Ďîńŕäęŕ ĘËŔ âűďîëí˙ĺňń˙ ń čńďîëüçîâŕíčĺě ęîîđäčíŕň ňî÷ęč ďîńŕäęč, ďîëó÷ĺííűő â đĺçóëüňŕňĺ âűďîëíĺíč˙ ôóíęöčîíŕëüíîăî áëîęŕ Ŕ4, â ęŕ÷ĺńňâĺ óďđŕâëĺíč˙ čńďîëüçóĺňń˙ ńęîđđĺęňčđîâŕííîĺ ďîëĺňíîĺ çŕäŕíčĺ, ŕ â ęŕ÷ĺńňâĺ ěĺőŕíčçěŕ čńďîëüçóţňń˙ ÁĘÍĎ č îńíîâíűĺ óńňđîéńňâŕ îáĺńďĺ÷ĺíč˙ íŕâĺäĺíč˙ č ďîńŕäęč – Îďňč÷ĺńęčé ďĺëĺíăŕňîđ č Âűńîňîěĺđ.Ďîńëĺ ďîńŕäęč áîđňîâîé ęîěďëĺęń îďđĺäĺë˙ĺň čńňčííîĺ ďîëîćĺíčĺ č îđčĺíňŕöčţ ŕďďŕđŕňŕ íŕ ďîâĺđőíîńňč čńńëĺäóĺěîăî ňĺëŕ. Ďîëó÷ĺííűĺ äŕííűĺ âęëţ÷ŕňń˙ â îň÷ĺň î ďîńŕäęĺ ĘËŔ, ęîňîđűé ęŕęđĺçóëüňŕň ôóíęöčîíčđîâŕíč˙ áëîęŕ č â öĺëîě âńĺăî ďđîöĺńńŕ ďĺđĺäŕĺňń˙ íŕ Çĺěëţ äë˙ ŕíŕëčçŕ č óňî÷íĺíč˙ çŕäŕ÷ ěčńńčč. Ďđčâĺäĺě äčŕăđŕěěű ďđîöĺńńîâ, ďđîčńőîä˙ůčő â ôóíęöčîíŕëüíűő áëîęŕő, ďđčâĺäĺííűő âűřĺ.
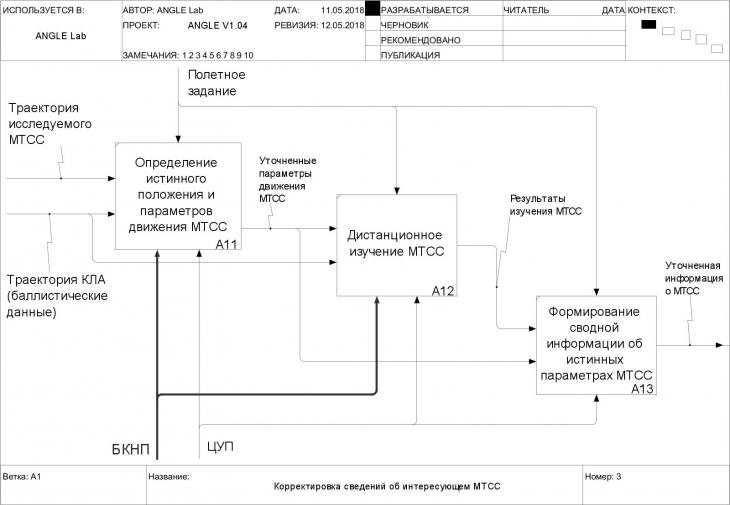
Đčńóíîę 3. Äčŕăđŕěěŕ äĺęîěďîçčöčč ôóíęöčîíŕëüíîăî áëîęŕ Ŕ1.
Íŕ äčŕăđŕěěĺ Ŕ1 Ęîđđĺęňčđîâęŕ ńâĺäĺíčé îá číňĺđĺńóţůĺě íĺáĺńíîě ňĺëĺ. (Đčńóíîę 3) đŕńńěîňđĺíŕ äĺęîěďîçčöč˙ ôóíęöčîíŕëüíîăî áëîęŕ Ŕ1. Čńőîä˙ čő ŕíŕëčçŕ ďđĺäěĺňíîé îáëŕńňč č äĺňŕëüíîăî óňî÷íĺíč˙ âűďîëí˙ĺěűő çŕäŕ÷ ČŃ, áűëč îďđĺäĺëĺííű ńëĺäóţůčĺ ôóíęöčîíŕëüíűĺ ýëĺěĺíňű:
· Îďđĺäĺëĺíčĺ čńňčííîăî ďîëîćĺíč˙ č ďŕđŕěĺňđîâ äâčćĺíč˙ ěŕëîăî ňĺëŕ ńîëíĺ÷íîé ńčńňĺěű;
· Äčńňŕíöčîííîĺ čçó÷ĺíčĺ ĚŇŃŃ (âęëţ÷ŕ˙ îďđĺäĺëĺíčĺ čńňčííîăî đŕçěĺđŕ ěŕëîăî ňĺëŕ ńîëíĺ÷íîé ńčńňĺěű;
· Ôîđěčđîâŕíčĺ ńâîäíîé číôîđěŕöčč îá čńňčííűő ďŕđŕěĺňđŕő ěŕëîăî ňĺëŕ ńîëíĺ÷íîé ńčńňĺěű;
Ďĺđâűě ďđîöĺńńîě ˙âë˙ĺňń˙ îďđĺäĺëĺíčĺ čńňčííîăî ďîëîćĺíč˙ č ďŕđŕěĺňđîâ äâčćĺíč˙ ěŕëîăî ňĺëŕ ńîëíĺ÷íîé ńčńňĺěű. Äŕííűé áëîę čńďîëüçóĺň ďŕđŕěĺňđű ňđŕĺęňîđčč äâčćĺíč˙ ěŕëîăî ňĺëŕ ńîëíĺ÷íîé ńčńňĺěű, ęîňîđűĺ čçâĺńňíű čç íŕçĺěíűő íŕáëţäĺíčé č çŕëîćĺíű â ďŕě˙ňü áîđňîâîăî ęîěďëĺęńŕ íŕâĺäĺíč˙ č ďîńŕäęč ńďĺöčŕëčńňŕěč ęîěŕíäű ěčńńčč.  ęŕ÷ĺńňâĺ óďđŕâëĺíč˙ čńďîëüçóĺňń˙ ďîëĺňíîĺ çŕäŕíčĺ, îďčńűâŕţůĺĺ ŕëăîđčňě âűďîëíĺíč˙ ýňčő äĺéńňâčé, ŕ â ęŕ÷ĺńňâĺ ěĺőŕíčçěŕ ÖÓĎ č ÁĘÍĎ, âęëţ÷ŕ˙ ňŕęčĺ óńňđîéńňâŕ, ęŕę ôîňîęŕěĺđű, çâĺçäíűĺ äŕň÷čęč, číĺđöčŕëüíűĺ äŕň÷čęč č âű÷čńëčňĺëüíűĺ ńđĺäńňâŕ íŕ áîđňó ĘËŔ. Đĺçóëüňŕňîě ôóíęöčîíčđîâŕíč˙ ˙âë˙ĺňń˙ óňî÷íĺííűĺ ďŕđŕěĺňđű äâčćĺíč˙ ěŕëîăî ňĺëŕ ńîëíĺ÷íîé ńčńňĺěű.
Ńëĺäóţůčé ýňŕď – äčńňŕíöčîííîĺ čçó÷ĺíčĺ ĚŇŃŃ.  ýňîě ôóíęöčîíŕëüíîě áëîęĺ âűďîëí˙ţňń˙ ďđîöĺäóđű ďî îďđĺäĺëĺíčţ ńâîéńňâ ĚŇŃŃ, íĺîáőîäčěűő äë˙ đŕń÷ĺňŕ ďŕđŕěĺňđîâ ěŕíĺâđŕ ĘËŔ, äë˙ ńáëčćĺíč˙ č ôîňîńúĺěęč ďîâĺđőíîńňč, ń öĺëüţ ďîčńęŕ ěĺńňŕ ďîńŕäęč. Äë˙ îďđĺäĺëĺíč˙ đŕçěĺđîâ, ôîđěű, ěŕńńű, ďëîňíîńňč, ńîáńňâĺííîăî âîçěóůĺííîăî äâčćĺíč˙ č äđóăčő âŕćíűő ďŕđŕěĺňđîâ íŕ âőîäĺ â áëîę, čńďîëüçóţňń˙ óňî÷íĺííűĺ ďŕđŕěĺňđű äâčćĺíč˙ ĚŇŃŃ, ŕ ňŕęćĺ äŕííűĺ î ňđŕĺęňîđčč ĘËŔ, â ęŕ÷ĺńňâĺ óďđŕâëĺíč˙ čńďîëüçóĺňń˙ ďîëĺňíîĺ çŕäŕíčĺ, ŕ â ęŕ÷ĺńňâĺ ěĺőŕíčçěŕ Áîđňîâîé ęîěďëĺęń íŕâĺäĺíč˙ č ďîńŕäęč č öĺíňđó óďđŕâëĺíč˙ ďîëĺňŕěč (ÖÓĎ), ăäĺ îáđŕáŕňűâŕţňń˙ äŕííűĺ, ęîňîđűĺ íĺ ěîăóň áűňü îáđŕáîňŕíű ÁĘÍĎ. Íŕ âűőîäĺ čç áëîęŕ ďîëó÷ŕĺě äŕííűĺ đĺçóëüňŕňű čçó÷ĺíč˙ ĚŇŃŃ, ęîňîđűĺ âěĺńňĺ ń óňî÷íĺííűěč ďŕđŕěĺňđŕěč äâčćĺíč˙ ĚŇŃŃ íŕďđŕâë˙ţňń˙ íŕ âőîä ńëĺäóţůĺăî áëîęŕ – Ôîđěčđîâŕíčĺ ńâîäíîé číôîđěŕöčč îá čńňčííűő ďŕđŕěĺňđŕő ĚŇŃŃ. Óďđŕâë˙ţůčě âîçäĺéńňâčĺě â äŕííîě áëîęĺ âűńňóďŕĺň ďîëĺňíîĺ çŕäŕíčĺ. Ěíîăčĺ čç ďđîöĺäóđ č ŕëăîđčňěîâ ýňîăî ôóíęöčîíŕëüíîăî áëîęŕ âĺńüěŕ ńëîćíű č ňđĺáóţň čńďîëüçîâŕíč˙ ďđîčçâîäčňĺëüíűő ńđĺäńňâ âű÷čńëĺíč˙, ęîňîđűő íĺň â ńîńňŕâĺ ÁĘÍĎ, ďîýňîěó â ęŕ÷ĺńňâĺ ôîđěŕëüíîăî ěĺőŕíčçěŕ áëîęŕ čńďîëüçóĺňń˙ ÖÓĎ.  đĺçóëüňŕňĺ ôîđěčđóĺňń˙ ńâîäíŕ˙ číôîđěŕöč˙ îá čńńëĺäóĺěîě ĚŇŃŃ. Đĺçóëüňŕňîě ôóíęöčîíčđîâŕíč˙ ˙âë˙ĺňń˙ óňî÷íĺííŕ˙ číôîđěŕöč˙ îá čńńëĺäóĺěîě ěŕëîě ňĺëĺ ńîëíĺ÷íîé ńčńňĺěű, âęëţ÷ŕ˙ ďŕđŕěĺňđű, íĺîáőîäčěűĺ äë˙ đŕń÷ĺňŕ ďŕđŕěĺňđîâ ňđŕĺęňîđčč ĘËŔ äë˙ äŕëüíĺéřĺăî äĺňŕëüíîăî čçó÷ĺíč˙ ĚŇŃŃ. Ýňŕ číôîđěŕöč˙ ˙âë˙ĺňń˙ âőîä˙ůĺé â číôîđěŕöčîííîě áëîęĺ Ŕ2.
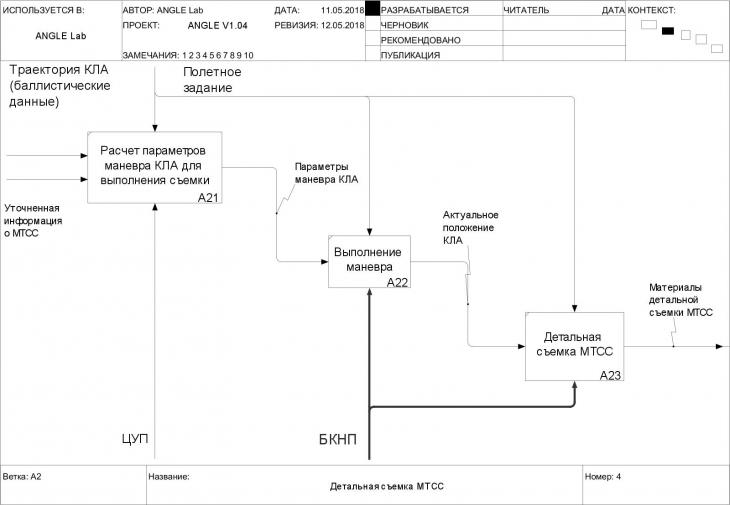
Đčńóíîę 4. Äčŕăđŕěěŕ äĺęîěďîçčöčč ôóíęöčîíŕëüíîăî áëîęŕ Ŕ2. IDEF0.
Íŕ äčŕăđŕěěĺ äĺęîěďîçčöčč óđîâí˙ Ŕ2 (Đčńóíîę 4), đŕńńěŕňđčâŕĺňń˙ ďđîöĺńń âűďîëíĺíč˙ äĺňŕëüíîé ńúĺěęč ĚŇŃŃ. Íŕ îńíîâŕíčč ŕíŕëčçŕ ďđĺäěĺňíîé îáëŕńňč îďđĺäĺëĺííű ńëĺäóţůčĺ ôóíęöčîíŕëüíűĺ áëîęč:
- Đŕń÷ĺň ďŕđŕěĺňđîâ ěŕíĺâđŕ ĘËŔ äë˙ âűďîëíĺíč˙ ńúĺěęč;
-
|


 Cn
Cn










