|
Ďđîăđŕěěíűĺ ńčńňĺěű č âű÷čńëčňĺëüíűĺ ěĺňîäű
Ďđŕâčëüíŕ˙ ńńűëęŕ íŕ ńňŕňüţ:
Řĺőîâöîâ Ă.Ŕ., Ćčëčíŕ Í.Ä., Đŕńęŕňęčíŕ Î.Â.
Áĺńęîíňŕęňíűé ěĺňîä îďđĺäĺëĺíč˙ íĺďđ˙ěîëčíĺéíîńňč ďîäęđŕíîâűő đĺëüńîâ ěîńňîâűő ęđŕíîâ ďóňĺě îáđŕáîňęč ôîňîčçîáđŕćĺíčé
// Ďđîăđŕěěíűĺ ńčńňĺěű č âű÷čńëčňĺëüíűĺ ěĺňîäű.
2019. ą 4.
Ń. 105-114.
DOI: 10.7256/2454-0714.2019.4.31110 URL: https://nbpublish.com/library_read_article.php?id=31110
Áĺńęîíňŕęňíűé ěĺňîä îďđĺäĺëĺíč˙ íĺďđ˙ěîëčíĺéíîńňč ďîäęđŕíîâűő đĺëüńîâ ěîńňîâűő ęđŕíîâ ďóňĺě îáđŕáîňęč ôîňîčçîáđŕćĺíčé
Řĺőîâöîâ Ăĺííŕäčé Ŕíŕňîëüĺâč÷
äîęňîđ ňĺőíč÷ĺńęčő íŕóę
ďđîôĺńńîđ, ęŕôĺäđŕ ęŕôĺäđŕ ăĺîčíôîđěŕňčęč, ăĺîäĺçčč č ęŕäŕńňđŕ, Íčćĺăîđîäńęčé ăîńóäŕđńňâĺííűé ŕđőčňĺęňóđíî-ńňđîčňĺëüíűé óíčâĺđńčňĺň
603950, Đîńńč˙, ă. Íčćíčé Íîâăîđîä, óë. Čëüčíńęŕ˙, 65, ęîđďóń 5
Shekhovtsov Gennady Anatolyevich
Doctor of Technical Science
Professor, Department of Geoinformatics, Geodesy and Cadastre Department, Nizhny Novgorod State University of Architecture and Civil Engineering
603950, Russia, g. Nizhnii Novgorod, ul. Il'inskaya, 65, korpus 5

|
kaf_ig@nngasu.ru
|
|
 |
Ćčëčíŕ Íŕňŕëü˙ Äěčňđčĺâíŕ
ęŕíäčäŕň ďĺäŕăîăč÷ĺńęčő íŕóę
äîöĺíň, ęŕôĺäđŕ ęŕôĺäđŕ číćĺíĺđíîé ăĺîěĺňđčč, ęîěďüţňĺđíîé ăđŕôčęč č ŕâňîěŕňčçčđîâŕííîăî ďđîĺęňčđîâŕíč˙, Íčćĺăîđîäńęčé ăîńóäŕđńňâĺííűé ŕđőčňĺęňóđíî-ńňđîčňĺëüíűé óíčâĺđńčňĺň
603950, Đîńńč˙, ă. Íčćíčé Íîâăîđîä, óë. Čëüčíńęŕ˙, 65, ęîđďóń 3
Zhilina Natalya Dmitrievna
PhD in Pedagogy
Associate Professor, Department of Engineering Geometry, Computer Graphics and Computer-aided Design Department, Nizhny Novgorod State University of Architecture and Civil Engineering
603950, Russia, g. Nizhnii Novgorod, ul. Il'inskaya, 65, korpus 3
|
|
zhilina@nngasu.ru
|
|
|
|
Đŕńęŕňęčíŕ Îëüăŕ Âŕëĺđüĺâíŕ
ŕńďčđŕíň, ęŕôĺäđŕ Číćĺíĺđíîé ăĺîěĺňđčč, ęîěďüţňĺđíîé ăđŕôčęč č ŕâňîěŕňčçčđîâŕííîăî ďđîĺęňčđîâŕíč˙, Íčćĺăîđîäńęčé ăîńóäŕđńňâĺííűé ŕđőčňĺęňóđíî-ńňđîčňĺëüíűé óíčâĺđńčňĺň
603950, Đîńńč˙, Íčćĺăîđîäńęŕ˙ îáëŕńňü, ă. Íčćíčé Íîâăîđîä, óë. Čëüčíńęŕ˙, 65
Raskatkina Olga Valer'evna
Postgraduate Student, Department of Engineering Geometry, Computer Graphics and Computer-Aided Design, Nizhny Novgorod State University of Architecture and Civil Engineering
603950, Russia, Nizhegorodskaya oblast', g. Nizhnii Novgorod, ul. Il'inskaya, 65
|
|
Raskatkina.o@mail.ru
|
|
|
|
DOI: 10.7256/2454-0714.2019.4.31110
Äŕňŕ íŕďđŕâëĺíč˙ ńňŕňüč â đĺäŕęöčţ:
21-10-2019
Äŕňŕ ďóáëčęŕöčč:
06-01-2020
Ŕííîňŕöč˙:
 ńňŕňüĺ îďčńŕí ěĺňîä îďđĺäĺëĺíč˙ íĺďđ˙ěîëčíĺéíîńňč ďîäęđŕíîâűő đĺëüńîâ ěîńňîâűő ęđŕíîâ ďóňĺě îáđŕáîňęč ôîňîčçîáđŕćĺíčé. Ěĺňîä íĺ ňđĺáóĺň ěŕđęčđîâęč íŕ đĺëüńŕő ńú¸ěî÷íűő ňî÷ĺę, čńďîëüçîâŕíč˙ ńďĺöčŕëüíűő ďđčńďîńîáëĺíčé č âűďîëíĺíč˙ áîëüřîăî ęîëč÷ĺńňâŕ óăëîâűő, ëčíĺéíűő čëč číűő čçěĺđĺíčé. Ěĺňîä čńďîëüçóĺň ăîđčçîíňŕëüíóţ đĺôĺđĺíňíóţ ëčíčţ, ďđî÷ĺđ÷čâŕĺěóţ íŕ ńíčěęĺ čëč ńîçäŕâŕĺěóţ ń ďîěîůüţ čçîáđŕćĺíč˙ íŕ ńíčěęĺ íčňč ńâîáîäíî ďîäâĺřĺííîăî ďĺđĺä îáúĺęňčâîě říóđîâîăî îňâĺńŕ. Ëčíč˙ ňŕęćĺ ěîćĺň ńîçäŕâŕňüń˙ ń ďîěîůüţ ďđîăđŕěěű Plumb-bob, äŕţůĺé íŕ ńíčěęĺ čçîáđŕćĺíčĺ âĺđňčęŕëüíîé ëčíčč. Čçëîćĺí ŕëăîđčňě îáđŕáîňęč ńíčěęŕ ń ďîěîůüţ đŕńňđîâîăî đĺäŕęňîđŕ čçîáđŕćĺíčé ń öĺëüţ îďđĺäĺëĺíč˙ îňęëîíĺíčé îńĺâűő ňî÷ĺę đĺëüńŕ îň đĺôĺđĺíňíîé ďđ˙ěîé. Đŕńńěŕňđčâŕţňń˙ đŕçëč÷íűĺ âŕđčŕíňű îďđĺäĺëĺíč˙ đŕçěĺđŕ îäíîăî ďčęńĺë˙ â çŕâčńčěîńňč îň đŕńńňî˙íč˙ ńú¸ěęč č âűńîňű đŕńďîëîćĺíč˙ ęŕěĺđű íŕä đĺëüńîě. Ďđčâĺäĺíű đĺçóëüňŕňű čçěĺđĺíčé č čő ńđŕâíĺíčĺ ń đĺçóëüňŕňŕěč, ďîëó÷ĺííűěč ňđŕäčöčîííűěč ěĺňîäŕěč, ďîęŕçŕâřĺĺ đŕńőîćäĺíčĺ 0-5 ěě. Îďčńŕí ŕëăîđčňě îďđĺäĺëĺíč˙ ęîëč÷ĺńňâŕ ďčęńĺëĺé, ńîäĺđćŕůčőń˙ â ëčíčč, ńîîňâĺňńňâóţůĺé çŕäŕííîěó đŕńńňî˙íčţ äî ëţáîé ńú¸ěî÷íîé ňî÷ęč, ÷ňî ďîçâîë˙ĺň ďđîčçâîäčňü íŕ ńíčěęĺ îďđĺäĺëĺíčĺ îňęëîíĺíčé â ëţáîě ěĺńňĺ ęđŕíîâîăî ďóňč.
Ęëţ÷ĺâűĺ ńëîâŕ:
ôîňîčçîáđŕćĺíč˙, ďčęńĺëü, áŕçčń, îňâĺń, đĺôĺđĺíňíŕ˙ ëčíč˙, ďđ˙ěîëčíĺéíîńňü, áĺńęîíňŕęňíűĺ čçěĺđĺíč˙, ôîňîęŕěĺđŕ, ďîäęđŕíîâűé đĺëüń, îňęëîíĺíčĺ
ÓÄĘ 624-2/-9
Abstract: The article describes a method for determining the linearity of crane rails of bridge cranes by processing photo images. The method does not require marking of the shooting points on the rails, the use of special devices and performing a large number of angular, linear or other measurements. The method uses a horizontal reference line drawn on the image or created using the image on the image of the thread hanging freely in front of the lens cord plummet. The line can also be created using the Plumb-bob program, which gives the image of a vertical line. The image processing algorithm is described using a raster image editor to determine the deviations of the axial points of the rail from the reference line. Various options are being considered for determining the size of one pixel depending on the shooting distance and the height of the camera above the rail. The results of measurements and their comparison with the results obtained by traditional methods, which showed a difference of 0-5 mm are presented. An algorithm for determining the number of pixels contained in a line corresponding to a given distance to any shooting point is described, which allows for the determination of deviations in the image anywhere in the crane path.
Keywords: photo images, pixel, basis, plumb, reference line, straightdness, non-contact measurements, camera, crane rail, deviation
Abstract.
The article describes a method for determining the linearity of crane rails of bridge cranes by processing photo images. The method does not require marking of shooting points on rails, using special devices and performing a large number of angular, linear or other measurements. The method uses a horizontal reference line drawn on the image or created using the image on the image of the thread hanging freely in front of the lens cord plummet. The line can also be created using the Plumb-bob program, which gives the image of a vertical line. The image processing algorithm is described using a raster image editor to determine the deviations of the axial points of the rail from the reference line. Various options are being considered for determining the size of one pixel depending on the shooting distance and the height of the camera above the rail. The results of measurements and their comparison with the results obtained by traditional methods, which showed a difference of 0-5 mm, are presented. An algorithm for determining the number of pixels contained in a line corresponding to a given distance to any shooting point is described, which allows for the determination of deviations in the image anywhere in the crane path.
Ńóůĺńňâóĺň íĺńęîëüęî ěĺňîäîâ îďđĺäĺëĺíč˙ íĺďđ˙ěîëčíĺéíîńňč ďîäęđŕíîâűő đĺëüńîâ ěîńňîâűő ęđŕíîâ, ďîäđîáíî îďčńŕííűő â đŕáîňĺ [1]. Âńĺ îíč, ˙âë˙˙ńü ęîíňŕęňíűěč, ńâ˙çŕíű ń ěíîăîęđŕňíűě çŕäĺéńňâîâŕíčĺě ěîńňîâîăî ęđŕíŕ, íĺîáőîäčěîńňüţ âűőîäŕ čńďîëíčňĺëĺé íŕ ďîäęđŕíîâűé ďóňü č îáîçíŕ÷ĺíč˙ íŕ đĺëüńŕő ňî÷ĺę ńú¸ěęč. Ďđč ýňîě ňđĺáóĺňń˙ íŕëč÷čĺ ńďĺöčŕëüíűő ďđčńďîńîáëĺíčé, âűďîëíĺíčĺ áîëüřîăî ęîëč÷ĺńňâŕ óăëîâűő, ëčíĺéíűő čëč číűő čçěĺđĺíčé, ÷ňî â óńëîâč˙ő äĺéńňâóţůčő öĺőîâ ńîďđ˙ćĺíî ńî çíŕ÷čňĺëüíűěč ňđóäíîńň˙ěč.
Âűńęŕçŕííŕ˙ â đŕáîňĺ [2] čäĺ˙ čńďîëüçîâŕíč˙ ôîňîăđŕěěĺňđč÷ĺńęčő ńňâîđîâ ââčäó ńëîćíîńňč ęëŕńńč÷ĺńęîé îáđŕáîňęč ńíčěęîâ íĺ ďîëó÷čëŕ ńâîĺăî äŕëüíĺéřĺăî đŕçâčňč˙.  íŕńňî˙ůĺĺ âđĺě˙ â đ˙äĺ ńňŕňĺé [3, 4, 5, 6, 7] îáđŕůĺíî âíčěŕíčĺ íŕ äîńňîčíńňâŕ öčôđîâîé ôîňîăđŕěěĺňđčč, ďîçâîë˙ţůčĺ đĺęîěĺíäîâŕňü ĺ¸ äë˙ čçěĺđĺíč˙ ăĺîěĺňđčč îáúĺęňîâ áĺńęîíňŕęňíűě ěĺňîäîě.
 ńňŕňüĺ ďđĺäëŕăŕĺňń˙ áĺńęîíňŕęňíűé ěĺňîä îďđĺäĺëĺíč˙ ďđ˙ěîëčíĺéíîńňč ďîäęđŕíîâűő đĺëüńîâ, îńíîâŕííűé íŕ îáđŕáîňęĺ öčôđîâűő ôîňîčçîáđŕćĺíčé ń čńďîëüçîâŕíčĺě đĺôĺđĺíňíűő ëčíčé.
Ôîňîčçîáđŕćĺíčĺ ďîëó÷ŕĺňń˙ ń ďîěîůüţ öčôđîâîé ôîňîęŕěĺđű, óńňŕíîâëĺííîé íŕä đĺëüńîě â íŕ÷ŕëĺ ęîíňđîëčđóĺěîăî ó÷ŕńňęŕ. Đĺëüń ôîňîăđŕôčđóĺňń˙ â íŕďđŕâëĺíčč ĺăî ęîíĺ÷íîé ňî÷ęč (đčń. 1ŕ). Ôîňîčçîáđŕćĺíčĺ çŕăđóćŕĺňń˙ â ëţáîé đŕńňđîâűé đĺäŕęňîđ, ďîńëĺ ÷ĺăî ńíčěŕţňń˙ đŕńňđîâűĺ ęîîđäčíŕňű ęóđńîđŕ ëĺâîăî č ďđŕâîăî ęđŕ˙ đĺëüńŕ â íŕ÷ŕëüíîé č ęîíĺ÷íîé ňî÷ęŕő ęîíňđîëčđóĺěîăî ó÷ŕńňęŕ (âĺëč÷číű Ë1, Ď1 č Ën, Ďn). Íŕ ńíčěęĺ ńňđîčňń˙ đĺôĺđĺíňíŕ˙ ëčíč˙ 1-n ňŕę, ÷ňîáű đŕńňđîâűĺ ęîîđäčíŕňű â ňî÷ęŕő 1 č náűëč ńîîňâĺňńňâĺííî đŕâíű (Ë1 + Ď1)/2 č (Ën+ Ďn)/2. Äŕëĺĺ ńíčěŕţňń˙ đŕńňđîâűĺ ęîîđäčíŕňű ęóđńîđŕ ďîńëĺäîâŕňĺëüíî ëĺâîăî ęđŕ˙ đĺëüńŕ, â ňî÷ęŕő 2, 3, 4,… đĺôĺđĺíňíîé ëčíčč č ďđŕâîăî ęđŕ˙ đĺëüńŕ (âĺëč÷číű Ë, Î č Ď â ďčęńĺë˙ő (ďęń), ńîîňâĺňńňâóţůčĺ ęŕćäîěó ďîëîćĺíčţ ęóđńîđŕ, ńě. đčń. 1á).
Ďî çíŕ÷ĺíč˙ě ýňčő ęîîđäčíŕň âű÷čńë˙ţňń˙ îňęëîíĺíč˙ Δ îńč đĺëüńŕ îň đĺôĺđĺíňíîé ëčíčč â ďčęńĺë˙ő, ďđč÷¸ě, çíŕę «ďëţń» îçíŕ÷ŕĺň îňęëîíĺíčĺ âëĺâî, çíŕę «ěčíóń» – âďđŕâî.
Δ = Î – (Ë + Ď)/2 , (1)
Äë˙ ďĺđĺâîäŕ ďîëó÷ĺííűő đĺçóëüňŕňîâ â ěĺňđč÷ĺńęóţ ńčńňĺěó ĺäčíčö (ěě) íĺîáőîäčěî ďîäń÷čňŕííűĺ ďî ôîđěóëĺ (1) çíŕ÷ĺíč˙ Δ ďęń óěíîćčňü íŕ ńîîňâĺňńňâóţůčé čě đŕçěĺđ ďčęńĺë˙ δ ěě/ďęń, îďđĺäĺë˙ĺěűé ďî ôîđěóëĺ
 (2) (2)
ăäĺ l – řčđčíŕ ăîëîâęč đĺëüńŕ (Ď – Ë) â ěě č â ďęń.
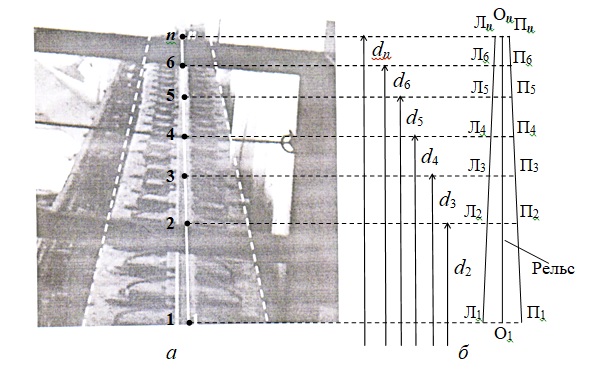
Đčń. 1. Ôîňîăđŕôč˙ đĺëüńŕ ń đĺôĺđĺíňíîé ëčíčĺé 1-n (ŕ) č ńőĺěîé čçěĺđĺíč˙ (á)
Ęëţ÷ĺâűě ěîěĺíňîě îďčńŕííîăî ďîäőîäŕ ˙âë˙ĺňń˙ óńňŕíîâëĺíčĺ çŕâčńčěîńňč đŕçěĺđŕ îäíîăî ďčęńĺë˙ â ěĺňđč÷ĺńęčő âĺëč÷číŕő äë˙ đŕçíűő đŕńńňî˙íčé d (đčń. 1á). Ń ýňîé öĺëüţ áűëî âűďîëíĺíî çíŕęîâîĺ ěîäĺëčđîâŕíčĺ, ńóůíîńňü ęîňîđîăî çŕęëţ÷ŕëîńü â ôîňîăđŕôčđîâŕíčč äîđîćíîăî áîđäţđŕ ń čçâĺńňíűěč đŕçěĺđŕěč (đčń. 2ŕ) ń âűńîňű 1,0 č 1,5 ě.
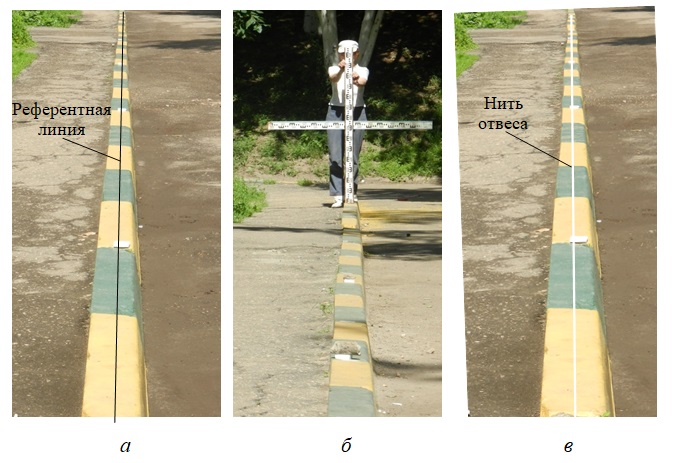
Đčń. 2. Ôîňîăđŕôčč áîđäţđŕ ń đĺôĺđĺíňíîé ëčíčĺé (ŕ), ń «ęđĺńňîě» (á) č îňâĺńîě (â)
Ďî ďîëó÷ĺííűě ôîňîčçîáđŕćĺíč˙ě â đŕńňđîâîě đĺäŕęňîđĺ áűëč îďđĺäĺëĺíű đŕńňđîâűĺ ęîîđäčíŕňű ëĺâîăî Ë č ďđŕâîăî Ď ęđŕ˙ áîđäţđíîăî ęŕěí˙ ń číňĺđâŕëîě 1 ě. Ďî đŕçíîńňč ýňčő ęîîđäčíŕň č řčđčíĺ áîđäţđíîăî ęŕěí˙ 120 ěě áűëč ďîäń÷čňŕíű đŕçěĺđű â ěě îäíîăî ďčęńĺë˙ äë˙ ęŕćäîăî đŕńńňî˙íč˙.
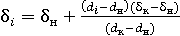
Ďî ďîëó÷ĺííűě äŕííűě ďîńňđîĺíű ăđŕôčęč (đčń. 3), íŕăë˙äíî čëëţńňđčđóţůčĺ, âî-ďĺđâűő, ďđ˙ěîëčíĺéíóţ çŕâčńčěîńňü ěĺćäó δ č d č, âî-âňîđűő, ňîň ôŕęň, ÷ňî ń óěĺíüřĺíčĺě âűńîňű ôîňîăđŕôčđîâŕíč˙ óěĺíüřŕĺňń˙ đŕçěĺđ îäíîăî ďčęńĺë˙.
Ďîńęîëüęó çŕâčńčěîńňü δ îň díîńčň ďđ˙ěîëčíĺéíűő őŕđŕęňĺđ, ňî íŕ ďđŕęňčęĺ đĺęîěĺíäóĺňń˙ îăđŕíč÷čňüń˙ ňůŕňĺëüíűě îďđĺäĺëĺíčĺě δí â íŕ÷ŕëĺ č δę â ęîíöĺ ęîíňđîëčđóĺěîăî ó÷ŕńňęŕ, ŕ ëţáîé đŕçěĺđ ďčęńĺë˙ δi ěîćĺň áűňü íŕéäĺí ďî ôîđěóëĺ:
 , (3) , (3)
ăäĺ δi – đŕçěĺđ ďčęńĺë˙ íŕ đŕńńňî˙íčč di; δí– đŕçěĺđ ďčęńĺë˙ íŕ đŕńńňî˙íčč dí ; δę – đŕçěĺđ ďčęńĺë˙ íŕ đŕńńňî˙íčč dę .
Ďî ôîđěóëĺ (3) áűëč ďîäń÷čňŕíű ňĺîđĺňč÷ĺńęčĺ çíŕ÷ĺíč˙ δ. Čő đŕńőîćäĺíčĺ ń ýęńďĺđčěĺíňŕëüíűěč äŕííűěč îęŕçŕëčńü â ďđĺäĺëŕő îň –0,6 äî +0,2 ďęń äë˙ âűńîňű ôîňîęŕěĺđű 1,5 ě č îň –0,2 äî +0,1 ďęń äë˙ âűńîňű 1,0 ě. Äë˙ ďîâűřĺíč˙ ňî÷íîńňč îďđĺäĺëĺíč˙ đŕçěĺđŕ ďčęńĺë˙ íŕ đŕńńňî˙íč˙ő dí č dę óäîáíî čńďîëüçîâŕňü íčâĺëčđíóţ đĺéęó, óńňŕíŕâëčâŕĺěóţ ăîđčçîíňŕëüíî čëč âĺđňčęŕëüíî.
Đčń. 3. Ăđŕôčęč çŕâčńčěîńňč đŕçěĺđŕ ďčęńĺë˙ δ îň đŕńńňî˙íč˙ dč âűńîňű
đŕńďîëîćĺíč˙ ęŕěĺđű 1,5 ě, 1,0 ě č 0,75 ě
Ń öĺëüţ îďđĺäĺëĺíč˙ ńîîňíîřĺíč˙ đŕçěĺđîâ îäíîăî ďčęńĺë˙, íŕéäĺííűő ďî ăîđčçîíňŕëüíîěó č âĺđňčęŕëüíîěó áŕçčńŕě. áűëŕ âűďîëíĺíŕ ńîîňâĺňńňâóţůŕ˙ ęŕëčáđîâęŕ öčôđîâîé ôîňîęŕěĺđű Nikon COOLPIX S9100.
Ěĺňîäčęŕ ęŕëčáđîâęč çŕęëţ÷ŕëŕńü â ôîňîăđŕôčđîâŕíčč «ęđĺńňŕ» čç äâóő 1,5-ěĺňđîâűő íčâĺëčđíűő đĺĺę â číňĺđâŕëĺ îň 2 äî 30 ě (đčń. 2á). Äë˙ ýňîăî ôîňîęŕěĺđŕ öĺíňđčđîâŕëŕńü íŕä îńüţ áîđäţđŕ â ĺăî íŕ÷ŕëĺ íŕ âűńîňĺ 0,75 ě. Îďňč÷ĺńęŕ˙ îńü ęŕěĺđű îđčĺíňčđîâŕëŕńü âäîëü ýňîé ďîëîńű č áűëŕ íŕďđŕâëĺíŕ íŕ öĺíňđ «ęđĺńňŕ», óńňŕíîâëĺííîăî â ęîíöĺ ęîíňđîëčđóĺěîăî ó÷ŕńňęŕ. Ďîńëĺäîâŕňĺëüíî ďđč íĺďîäâčćíîě ďîëîćĺíčč ôîňîęŕěĺđű ôîňîăđŕôčđîâŕëč «ęđĺńň», îäíîîáđŕçíî óńňŕíŕâëčâŕĺěűé ďî îńč áîđäţđŕ.
Íŕ ęŕćäîé ôîňîăđŕôčč â đŕńňđîâîě đĺäŕęňîđĺ ńíčěŕëčńü đŕńňđîâűĺ ęîîđäčíŕňű â ďčęńĺëŕő ëĺâîăî Ë, ďđŕâîăî Ď, âĺđőíĺăî Âč íčćíĺăî Íęîíöîâ îáîčő áŕçčńîâčëč čő âčäčěîé íŕ ńíčěęĺ ÷ŕńňč. Đĺçóëüňŕňű îáđŕáîňęč ńíčěęîâ čëëţńňđčđóţňń˙ ńîâěĺů¸ííűě ăđŕôčęîě íŕ đčń. 3, ďîäňâĺđćäŕ˙, âî-ďĺđâűő, đŕíĺĺ ńäĺëŕííűé âűâîä î çŕâčńčěîńňč đŕçěĺđŕ îäíîăî ďčęńĺë˙ îň âűńîňű đŕńďîëîćĺíč˙ ôîňîęŕěĺđű. Âî-âňîđűő, äë˙ ôîňîęŕěĺđű Nikon COOLPIX S9100 îďđĺäĺëĺíčĺ đŕçěĺđŕ îäíîăî ďčęńĺë˙ ěîćĺň îńóůĺńňâë˙ňüń˙ ęŕę ďî ăîđčçîíňŕëüíîěó, ňŕę č ďî âĺđňčęŕëüíîěó áŕçčńó.
Ęđîěĺ ňîăî, ďî ôîđěóëĺ (3) áűëč ďîäń÷čňŕíű ňĺîđĺňč÷ĺńęčĺ çíŕ÷ĺíč˙ δ. Čő đŕńőîćäĺíčĺ ń ýęńďĺđčěĺíňŕëüíűěč äŕííűěč îęŕçŕëčńü íč÷ňîćíűěč â ďđĺäĺëŕő îň –0,01 äî +0,02 ďęń.
Îňëč÷čňĺëüíîé îńîáĺííîńňüţ ďđĺäëŕăŕĺěîăî áĺńęîíňŕęňíîăî ěĺňîäŕ ˙âë˙ĺňń˙ ňî, ÷ňî â ęŕ÷ĺńňâĺ đĺôĺđĺíňíîé ëčíčč ěîćĺň áűňü čńďîëüçîâŕíŕ íčňü říóđîâîăî îňâĺńŕ. Äë˙ ýňîăî äîńňŕňî÷íî ńôîňîăđŕôčđîâŕňü îňâĺń íŕ ôîíĺ čńńëĺäóĺěîăî ó÷ŕńňęŕ. Ĺńëč íŕ ôîňîăđŕôčč (đčń. 2â) íčňü îňâĺńŕ áóäĺň ńîâďŕäŕňü ń íŕ÷ŕëüíîé č ęîíĺ÷íîé ňî÷ęŕěč ëčíčč 1-n, ňî â đĺçóëüňŕňĺ îáđŕáîňęč ńíčěęŕ ěîćíî ďîëó÷čňü ńđŕçó îňęëîíĺíč˙ îńĺâűő ňî÷ĺę đĺëüńŕ îň ýňîé ëčíčč.  ýňîě îňíîřĺíčč ďđĺäńňŕâë˙ĺňń˙ ďĺđńďĺęňčâíűě ďđčěĺíĺíčĺ ďđîăđŕěěű Plumb-bob, ďîçâîë˙ţůĺé âńĺăäŕ čěĺňü íŕ ńíčěęĺ čçîáđŕćĺíčĺ âĺđňčęŕëüíîé ďđ˙ěîé, ęîňîđóţ ěîćíî čńďîëüçîâŕňü â ęŕ÷ĺńňâĺ đĺôĺđĺíňíîé ëčíčč.
Äë˙ îďđĺäĺëĺíč˙ íĺďđ˙ěîëčíĺéíîńňč áîđäţđŕ áűëŕ ďđîâĺäĺíŕ íŕ ôîňîăđŕôčč, âűďîëíĺííîé ń âűńîňű ôîňîęŕěĺđű 1,0 ě, đĺôĺđĺíňíŕ˙ ëčíč˙ (đčń. 2ŕ) ÷ĺđĺç íŕ÷ŕëüíóţ č ęîíĺ÷íóţ ňî÷ęč, ęîňîđűě ńîîňâĺňńňâîâŕëč đŕńňđîâűĺ ęîîđäčíŕňű (Ëí + Ďí)/2 č (Ëę+ Ďę) /2 č ÷ĺđĺç 2 ě áűëč îďđĺäĺëĺíű ęîîđäčíŕňű Ë, Î č Ď č âű÷čńëĺíű çíŕ÷ĺíč˙ (Ë + Ď)/2.
Äë˙ ňîăî, ÷ňîáű îáíŕđóćčňü âîçěîćíűĺ ăđóáűĺ îřčáęč â çŕěĺđĺííűő ęîîđäčíŕňŕő Ë, Ď, Î č ďîëóńóěěĺ (Ë + Ď)/2, ďîńňđîĺíű ăđŕôčęč, ďđĺäńňŕâëĺííűĺ íŕ đčń. 4.
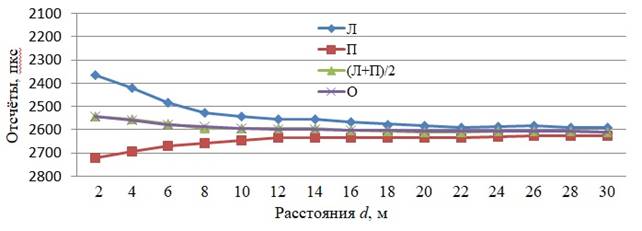
Đčń. 4. Ăđŕôčęč çŕâčńčěîńňč îňń÷¸ňîâ Ë, Î, Ď, (Ë+Ď)/2 ďî ęóđńîđó îň đŕńńňî˙íč˙ d
Ďî ôîđěóëĺ (1) ń ó÷¸ňîě ôîđěóëű (2) áűëč ďîäń÷čňŕíű îňęëîíĺíč˙ Δ â ěě. Äë˙ ęîíňđîë˙ áűëî âűďîëíĺíî îáű÷íîĺ áîęîâîĺ íčâĺëčđîâŕíčĺ áîđäţđŕ č ďîäń÷čňŕíű îňęëîíĺíč˙ Δʹ. Ďî čő çíŕ÷ĺíč˙ě ďîńňđîĺíű ăđŕôčęč îňęëîíĺíčé îńĺâűő ňî÷ĺę áîđäţđŕ îň đĺôĺđĺíňíîé ëčíčč (đčń. 5), íŕăë˙äíî ďîęŕçűâŕţůčĺ őîđîřóţ ńőîäčěîńňü đĺçóëüňŕňîâ îáđŕáîňęč ôîňîńíčěęîâ č áîęîâîăî íčâĺëčđîâŕíč˙.
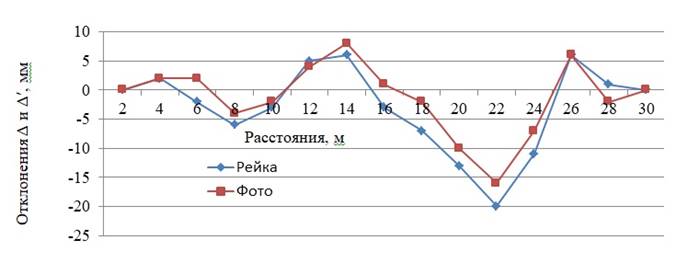
Đčń. 5. Ăđŕôčęč îňęëîíĺíčé îńĺâűő ňî÷ĺę áîđäţđŕ îň đĺôĺđĺíňíîé ëčíčč
Đĺřĺíčĺ çŕäŕ÷č ďî îďđĺäĺëĺíčţ íŕ ńíčěęĺ đŕńńňî˙íčé ěĺćäó ňî÷ęŕěč 1, 2, 3,… (đčń. 1) îńóůĺńňâë˙ëîńü ńëĺäóţůčě îáđŕçîě. Íŕ ńíčěęŕő (đčń. 2ŕ), âűďîëíĺííűő ń âűńîňű 1,0 č 1,5 ě, áűëî îďđĺäĺëĺíî ęîëč÷ĺńňâî đ ďčęńĺëĺé, ńîäĺđćŕůčőń˙ â čçâĺńňíűő đŕńńňî˙íč˙ő 3, 4, 5,…, 28, 29, 30 ě îň ôîňîęŕěĺđű äî ňî÷ĺę ńú¸ěęč. Đĺçóëüňŕňű čçěĺđĺíčé ďđĺäńňŕâëĺíű â ňŕáëčöĺ 1 (ăđŕôű 2, 4, 7, 9).
Ňŕáëčöŕ 1
Ńîîňíîřĺíčĺ ěĺćäó đŕńńňî˙íčĺě č ęîëč÷ĺńňâîě ďčęńĺëĺé
ďđč đŕçëč÷íîé âűńîňĺ đŕńďîëîćĺíč˙ ęŕěĺđű
|
Đŕń-ńňî-˙íč˙ d, ě
|
Ęîëč÷ĺńňâî ďčęńĺëĺé, ďęń
|
Đŕń-ńňî-˙íč˙ d, ě
|
Ęîëč÷ĺńňâî ďčęńĺëĺé, ďęń
|
|
Âűńîňŕ 1,0 ě
|
Âűńîňŕ 1,5 ě
|
Âűńîňŕ 1,0 ě
|
Âűńîňŕ 1,5 ě
|
|
p
|
Ŕ
|
p
|
Ŕ
|
p
|
Ŕ
|
p
|
Ŕ
|
|
1
|
2
|
3
|
4
|
5
|
6
|
| |


 Cn
Cn






