Ďđîăđŕěěíűĺ ńčńňĺěű č âű÷čńëčňĺëüíűĺ ěĺňîäű
Ďđŕâčëüíŕ˙ ńńűëęŕ íŕ ńňŕňüţ:
Äóáŕíîâ Ŕ.Ŕ.
Ŕíŕëčç ńęîđîńňĺé č ňđŕĺęňîđčé â çŕäŕ÷ŕő ăđóďďîâîăî ďđĺńëĺäîâŕíč˙
// Ďđîăđŕěěíűĺ ńčńňĺěű č âű÷čńëčňĺëüíűĺ ěĺňîäű.
2021. ą 3.
Ń. 1-10.
DOI: 10.7256/2454-0714.2021.3.35972 URL: https://nbpublish.com/library_read_article.php?id=35972
Ŕíŕëčç ńęîđîńňĺé č ňđŕĺęňîđčé â çŕäŕ÷ŕő ăđóďďîâîăî ďđĺńëĺäîâŕíč˙
Äóáŕíîâ Ŕëĺęńŕíäđ Ŕíŕňîëüĺâč÷
ęŕíäčäŕň ňĺőíč÷ĺńęčő íŕóę
Áóđ˙ňńęčé Ăîńóäŕđńňâĺííűé Óíčâĺđńčňĺň, Číńňčňóň Ěŕňĺěŕňčęč č Číôîđěŕňčęč, ęŕôĺäđŕ "Ăĺîěĺňđč˙ č ěĺňîäčęŕ ďđĺďîäŕâŕíč˙ ěŕňĺěŕňčęč"
670000, Đîńńč˙, đĺńďóáëčęŕ Áóđ˙ňč˙, ă. Óëŕí-Óäý, óë. Đŕíćóđîâŕ, 5, ęŕá. 1110
Dubanov Alexander Anatol'evich
PhD in Technical Science
Docent. the department of Geometry and Mathematics Teaching Technique, Buryat State University
670000, Russia, respublika Buryatiya, g. Ulan-Ude, ul. Ranzhurova, 5, kab. 1110

|
alandubanov@mail.ru
|
|
 |
Äđóăčĺ ďóáëčęŕöčč ýňîăî ŕâňîđŕ
|
|
|
DOI: 10.7256/2454-0714.2021.3.35972
Äŕňŕ íŕďđŕâëĺíč˙ ńňŕňüč â đĺäŕęöčţ:
20-06-2021
Äŕňŕ ďóáëčęŕöčč:
16-07-2021
Ŕííîňŕöč˙:
Äŕííŕ˙ ńňŕňü˙ ďîńâ˙ůĺíŕ ňîěó, ęŕę â çŕäŕ÷ĺ ăđóďďîâîăî ďđĺńëĺäîâŕíč˙ äîáčňüń˙ îäíîâđĺěĺííîăî äîńňčćĺíč˙ ďđĺńëĺäîâŕňĺë˙ěč ńâîčő öĺëĺé. Ďđĺäëîćĺííŕ˙ ěîäĺëü ďđĺńëĺäîâŕíč˙ îńíîâŕíŕ íŕ ňîě, ÷ňî ďđĺńëĺäîâŕňĺëü ńňŕđŕĺňń˙ ńëĺäîâŕňü ďđîăíîçčđóĺěîé ňđŕĺęňîđčč äâčćĺíč˙. Ďđîăíîçčđóĺěŕ˙ ňđŕĺęňîđč˙ äâčćĺíč˙ âűńňđŕčâŕĺňń˙ â ęŕćäűé ěîěĺíň âđĺěĺíč. Ňŕęŕ˙ ňđŕĺęňîđč˙ ˙âë˙ĺňń˙ ńîńňŕâíîé ęđčâîé, ó÷čňűâŕţůĺé îăđŕíč÷ĺíč˙ ďî ęđčâčçíĺ. Âđĺě˙ äîńňčćĺíč˙ öĺëč ęŕćäîăî ďđĺńëĺäîâŕňĺë˙ ĺńňü çŕâčńčěîńňü îň ńęîđîńňč äâčćĺíč˙ č ěčíčěŕëüíîăî đŕäčóńŕ ęđčâčçíű ňđŕĺęňîđčč. Ěíîăîôŕęňîđíűé ŕíŕëčç ěîäóëĺé ńęîđîńňĺé č ěčíčěŕëüíűő đŕäčóńîâ ęđčâčçíű ňđŕĺęňîđčé ęŕćäîăî čç ďđĺńëĺäîâŕňĺëĺé äë˙ îäíîâđĺěĺííîăî äîńňčćĺíč˙ ńâîčő öĺëĺé č ĺńňü öĺëü äë˙ čńńëĺäîâŕíčé, đŕńńěîňđĺííűő â äŕííîé ńňŕňüĺ. Äŕííŕ˙ ńňŕňü˙ ďîńâ˙ůĺíŕ ňîěó, ęŕę â çŕäŕ÷ĺ ăđóďďîâîăî ďđĺńëĺäîâŕíč˙ äîáčňüń˙ îäíîâđĺěĺííîăî äîńňčćĺíč˙ ďđĺńëĺäîâŕňĺë˙ěč ńâîčő öĺëĺé. Ďđĺäëîćĺííŕ˙ ěîäĺëü ďđĺńëĺäîâŕíč˙ îńíîâŕíŕ íŕ ňîě, ÷ňî ďđĺńëĺäîâŕňĺëü ńňŕđŕĺňń˙ ńëĺäîâŕňü ďđîăíîçčđóĺěîé ňđŕĺęňîđčč äâčćĺíč˙. Ďđîăíîçčđóĺěŕ˙ ňđŕĺęňîđč˙ äâčćĺíč˙ âűńňđŕčâŕĺňń˙ â ęŕćäűé ěîěĺíň âđĺěĺíč. Ňŕęŕ˙ ňđŕĺęňîđč˙ ˙âë˙ĺňń˙ ńîńňŕâíîé ęđčâîé, ó÷čňűâŕţůĺé îăđŕíč÷ĺíč˙ ďî ęđčâčçíĺ. Âđĺě˙ äîńňčćĺíč˙ öĺëč ęŕćäîăî ďđĺńëĺäîâŕňĺë˙ ĺńňü çŕâčńčěîńňü îň ńęîđîńňč äâčćĺíč˙ č ěčíčěŕëüíîăî đŕäčóńŕ ęđčâčçíű ňđŕĺęňîđčč. Ěíîăîôŕęňîđíűé ŕíŕëčç ěîäóëĺé ńęîđîńňĺé č ěčíčěŕëüíűő đŕäčóńîâ ęđčâčçíű ňđŕĺęňîđčé ęŕćäîăî čç ďđĺńëĺäîâŕňĺëĺé äë˙ îäíîâđĺěĺííîăî äîńňčćĺíč˙ ńâîčő öĺëĺé č ĺńňü öĺëü äë˙ čńńëĺäîâŕíčé, đŕńńěîňđĺííűő â äŕííîé ńňŕňüĺ.
Ęëţ÷ĺâűĺ ńëîâŕ:
Ďđĺńëĺäîâŕíčĺ, Ďđĺńëĺäîâŕňĺëü, Öĺëü, Ęđčâčçíŕ, Ëčíč˙, Ňđŕĺęňîđč˙, Ěíîăîôŕęňîđíűé, Äîńňčćĺíčĺ, Ďŕđŕëëĺëüíűé, Ďëîńęîńňü
Abstract: This article discusses how to the goal pursuers can simultaneously achieve their goals in the group pursuit task. The proposed pursuit model suggests the pursuer to follow the set motion pattern, which is structured at each point of time. Such trajectory is a compound curve that takes into account the curvature constraints. The time of achieving the goal of each pursuer depends on the velocity and minimum radius of curvature of the trajectory. Multi-factor analysis of velocity modules and minimum radius of curvature of the trajectories of each pursuer for simultaneous achievement of their goals is the focus of this research
Keywords: Persuit, Pursuer, Target, Curvature, Line, Trajectory, Multifactorial, Attainment, Parallel, Plane
I. Ââĺäĺíčĺ
 íŕńňî˙ůĺĺ âđĺě˙ đŕçâčâŕĺňń˙ ňĺőíîëîăč˙ áĺńďčëîňíűő áŕđđŕćčđóţůčő ëĺňŕňĺëüíűő ńíŕđ˙äîâ ń ŕâňîíîěíűě óďđŕâëĺíčĺě, îńíŕůĺííűő ńčńňĺěŕěč ń čńęóńńňâĺííűě číňĺëëĺęňîě. Ŕęňóŕëüíîé çŕäŕ÷ĺé ˙âë˙ĺňń˙, ęîăäŕ ăđóďďŕ ďđĺńëĺäîâŕňĺëĺé ďî ńčăíŕëó îďĺđŕňîđŕ ńőîäčň ńî ńâîčő çŕäŕííűő ňđŕĺęňîđčé, íŕ÷číŕĺň ďđĺńëĺäîâŕíčĺ ăđóďďű öĺëĺé. Äîńňčćĺíčĺ öĺëĺé ěîćĺň ďđîčńőîäčňü îäíîâđĺěĺííî čëč â íŕçíŕ÷ĺííűĺ çíŕ÷ĺíč˙ âđĺěĺíč. Đŕńďđĺäĺëĺíčĺ öĺëĺé ěîćĺň ďđîčńőîäčňü ŕâňîěŕňč÷ĺńęč čëč íŕçíŕ÷ŕňüń˙ îďĺđŕňîđîě.  äŕííîé ńňŕňüĺ đŕńńěŕňđčâŕĺňń˙ ńöĺíŕđčé, ęîăäŕ öĺëč äâčćóňń˙ ďđ˙ěîëčíĺéíî č đŕâíîěĺđíî íŕ ďëîńęîńňč, ŕ đŕńďđĺäĺëĺíčĺ öĺëĺé ďî ďđĺńëĺäîâŕňĺë˙ě ń÷čňŕĺňń˙ ďđîčçâĺäĺííűě.
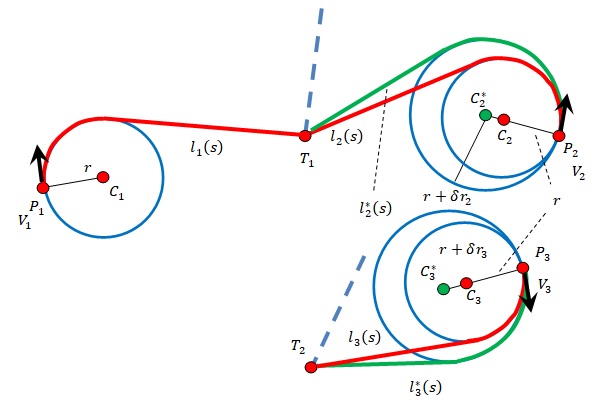
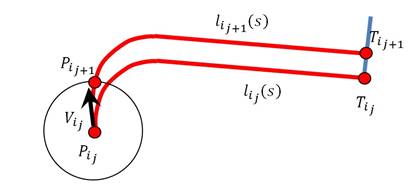
Đŕńńěîňđčě ěîäĺëü đŕń÷ĺňŕ ňđŕĺęňîđčč ďđĺńëĺäîâŕňĺë˙ íŕ ďëîńęîńňč, ăäĺ â ęŕćäűé ěîěĺíň âđĺěĺíč îň ďđĺńëĺäîâŕňĺë˙ äî öĺëč ńňđîčňń˙ ďđîăíîçčđóĺěŕ˙ ňđŕĺęňîđč˙, ęîňîđîé ďđĺńëĺäîâŕňĺëü áóäĺň ńňŕđŕňüń˙ ďđčäĺđćčâŕňüń˙ (Đčń. 1).
|
|
|
Đčń. 1. Ăđóďďîâîĺ ďđĺńëĺäîâŕíčĺ ěíîćĺńňâŕ öĺëĺé
|
Ęđčâűĺ  , ,  , ,  (Đčń. 1) ńîńňî˙ň čç ńĺăěĺíňŕ äóăč îęđóćíîńňč č ďđ˙ěîëčíĺéíîăî îňđĺçęŕ. Đŕäčóń îęđóćíîńňĺé č ĺńňü îăđŕíč÷ĺíčĺ ďî ęđčâčçíĺ ďđîăíîçčđóĺěűő ňđŕĺęňîđčé äâčćĺíč˙ ďđĺńëĺäîâŕňĺëĺé â íŕřĺé ěîäĺëč. Ĺńëč ďđĺńëĺäîâŕňĺëü íŕőîäčëń˙ â ěîěĺíň íŕ÷ŕëŕ ďđĺńëĺäîâŕíč˙ â ňî÷ęĺ (Đčń. 1) ńîńňî˙ň čç ńĺăěĺíňŕ äóăč îęđóćíîńňč č ďđ˙ěîëčíĺéíîăî îňđĺçęŕ. Đŕäčóń îęđóćíîńňĺé č ĺńňü îăđŕíč÷ĺíčĺ ďî ęđčâčçíĺ ďđîăíîçčđóĺěűő ňđŕĺęňîđčé äâčćĺíč˙ ďđĺńëĺäîâŕňĺëĺé â íŕřĺé ěîäĺëč. Ĺńëč ďđĺńëĺäîâŕňĺëü íŕőîäčëń˙ â ěîěĺíň íŕ÷ŕëŕ ďđĺńëĺäîâŕíč˙ â ňî÷ęĺ  ń âĺęňîđîě ńęîđîńňč ń âĺęňîđîě ńęîđîńňč  , ňî öĺíňđ îęđóćíîńňč , ňî öĺíňđ îęđóćíîńňč  đŕäčóńŕ đŕäčóńŕ  áóäĺň íŕőîäčňüń˙ â ňî÷ęĺ: áóäĺň íŕőîäčňüń˙ â ňî÷ęĺ:
Çŕňĺě čç ňî÷ęč ďîëîćĺíč˙ öĺëč  ńňđîčňń˙ ęŕńŕňĺëüíŕ˙ ę îęđóćíîńňč ńňđîčňń˙ ęŕńŕňĺëüíŕ˙ ę îęđóćíîńňč  . Ńîâîęóďíîńňü ęŕńŕňĺëüíîé č îęđóćíîńňč áóäĺň áŕçîâîé ëčíčĺé ďđîăíîçčđóĺěîé ňđŕĺęňîđčč äâčćĺíč˙ ďđĺńëĺäîâŕňĺë˙ . Ńîâîęóďíîńňü ęŕńŕňĺëüíîé č îęđóćíîńňč áóäĺň áŕçîâîé ëčíčĺé ďđîăíîçčđóĺěîé ňđŕĺęňîđčč äâčćĺíč˙ ďđĺńëĺäîâŕňĺë˙  . Îňěĺňčě, ÷ňî â óđŕâíĺíčč áŕçîâîé ëčíčč čç îäíîďŕđŕěĺňđč÷ĺńęîăî ěíîćĺńňâŕ ďđîăíîçčđóĺěűő ňđŕĺęňîđčé ďŕđŕěĺňđčçŕöč˙ ďđîčçâîäčňń˙ îň ĺĺ äëčíű äóăč. . Îňěĺňčě, ÷ňî â óđŕâíĺíčč áŕçîâîé ëčíčč čç îäíîďŕđŕěĺňđč÷ĺńęîăî ěíîćĺńňâŕ ďđîăíîçčđóĺěűő ňđŕĺęňîđčé ďŕđŕěĺňđčçŕöč˙ ďđîčçâîäčňń˙ îň ĺĺ äëčíű äóăč.
Ďđč íîâîě ďîëîćĺíčč öĺëč  ëčíč˙ ëčíč˙  ńěĺůŕĺňń˙, îńňŕâŕ˙ńü ďŕđŕëëĺëüíîé ńŕěîé ńĺáĺ (Đčń.2). ńěĺůŕĺňń˙, îńňŕâŕ˙ńü ďŕđŕëëĺëüíîé ńŕěîé ńĺáĺ (Đčń.2).
|
|
|
Đčń. 2. Îäíîďŕđŕěĺňđč÷ĺńęčĺ ńĺňč ďđîăíîçčđóĺěűő ňđŕĺęňîđčé äâčćĺíč˙ ďđĺńëĺäîâŕňĺëĺé
|
Ĺńëč  ďđĺńëĺäîâŕňĺëü â ěîěĺíň âđĺěĺíč ďđĺńëĺäîâŕňĺëü â ěîěĺíň âđĺěĺíč  íŕőîäčňń˙ â ňî÷ęĺ íŕőîäčňń˙ â ňî÷ęĺ  (Đčń. 3), čěĺ˙ ďđč ýňîě ďđîăíîçčđóĺěóţ ňđŕĺęňîđčţ äâčćĺíč˙ (Đčń. 3), čěĺ˙ ďđč ýňîě ďđîăíîçčđóĺěóţ ňđŕĺęňîđčţ äâčćĺíč˙  , ńîĺäčí˙ţůóţ ń ňĺęóůčě ďîëîćĺíčĺě öĺëč , ńîĺäčí˙ţůóţ ń ňĺęóůčě ďîëîćĺíčĺě öĺëč  , ňî ńëĺäóţůŕ˙ ňî÷ęŕ ňđŕĺęňîđčč ďđĺńëĺäîâŕňĺë˙ áóäĺň ňî÷ęŕ , ňî ńëĺäóţůŕ˙ ňî÷ęŕ ňđŕĺęňîđčč ďđĺńëĺäîâŕňĺë˙ áóäĺň ňî÷ęŕ  . .  . .
|
|
|
Đčń. 3. Čňĺđŕöčîííűé ďđîöĺńń đŕń÷ĺňŕ ňđŕĺęňîđčč ďđĺńëĺäîâŕňĺë˙
|
Ňî÷ęŕ ĺńňü ňî÷ęŕ ďĺđĺńĺ÷ĺíč˙ ëčíčč  , ńîîňâĺňńňâóţůĺé ďîëîćĺíčţ öĺëč , ńîîňâĺňńňâóţůĺé ďîëîćĺíčţ öĺëč  â ńëĺäóţůčé ěîěĺíň âđĺěĺíč â ńëĺäóţůčé ěîěĺíň âđĺěĺíč  , č îęđóćíîńňč ń öĺíňđîě â ňî÷ęĺ č đŕäčóńŕ , č îęđóćíîńňč ń öĺíňđîě â ňî÷ęĺ č đŕäčóńŕ  , ,  . Ňŕęîâŕ ěîäĺëü ďîńňđîĺíč˙ ňđŕĺęňîđčé ďđĺńëĺäîâŕňĺë˙. . Ňŕęîâŕ ěîäĺëü ďîńňđîĺíč˙ ňđŕĺęňîđčé ďđĺńëĺäîâŕňĺë˙.
II. Ďîńňŕíîâęŕ çŕäŕ÷č
Đŕńńěîňđčě çŕäŕ÷ó ăđóďďîâîăî ďđĺńëĺäîâŕíč˙, ęîăäŕ ăđóďďŕ ďđĺńëĺäîâŕňĺëĺé äîăîí˙ĺň ăđóďďó öĺëĺé. Áóäĺě ń÷čňŕňü, ÷ňî ęŕćäűé ďđĺńëĺäîâŕňĺëü ńňđĺěčňń˙ äîńňč÷ü ńâîĺé öĺëč , őîň˙ ó íĺęîňîđűő ďđĺńëĺäîâŕňĺëĺé öĺëč ěîăóň ńîâďŕäŕňü, ęŕę ďîęŕçŕíî íŕ đčńóíęŕő 1 č 2.
Ďđč÷ĺě ďđĺńëĺäîâŕňĺëü äîńňčăŕĺň öĺëč çŕ îďđĺäĺëĺííîĺ âđĺě˙  , äâčăŕ˙ńü ń îďđĺäĺëĺííîé ńęîđîńňüţ . Äë˙ îäíîâđĺěĺííîăî äîńňčćĺíč˙ öĺëĺé íĺîáőîäčěî đŕâĺíńňâî âńĺő çíŕ÷ĺíčé îďđĺäĺëĺííîěó çíŕ÷ĺíčţ. , äâčăŕ˙ńü ń îďđĺäĺëĺííîé ńęîđîńňüţ . Äë˙ îäíîâđĺěĺííîăî äîńňčćĺíč˙ öĺëĺé íĺîáőîäčěî đŕâĺíńňâî âńĺő çíŕ÷ĺíčé îďđĺäĺëĺííîěó çíŕ÷ĺíčţ.
Íŕ đčńóíęĺ 1 ďîęŕçŕíî, ÷ňî äë˙ čçěĺíĺíč˙ äëčíű áŕçîâîé ëčíčč ěîćíî čçěĺí˙ňü đŕäčóń ęŕńŕňĺëüíîé îęđóćíîńňč. Ęŕńŕňĺëüíŕ˙ îęđóćíîńňü áűëŕ ââĺäĺíŕ äë˙ ňîăî, ÷ňîáű ďđĺńëĺäîâŕňĺëü ěîă ďëŕâíî ďĺđĺéňč íŕ ďđ˙ěîëčíĺéíóţ ňđŕĺęňîđčţ. Ĺńëč áű ýňî áűëî ňŕę, ňî çŕäŕ÷ŕ áűëŕ áű ńâĺäĺíŕ ę ďđĺńëĺäîâŕíčţ ěĺňîäîě ďŕđŕëëĺëüíîăî ńáëčćĺíč˙.
Ďîńęîëüęó íŕ÷ŕëüíŕ˙ ńęîđîńňü ďđĺńëĺäîâŕňĺë˙ íŕďđŕâëĺíŕ ďđîčçâîëüíî, ňî ďđč ďîěîůč ńîńňŕâíîé áŕçîâîé ëčíčč, ęîňîđŕ˙ ďđč äâčćĺíčč öĺëč ďĺđĺěĺůŕĺňń˙, îńňŕâŕ˙ńü ďŕđŕëëĺëüíîé ńŕěŕ ńĺáĺ, ďđîčńőîäčň ďëŕâíűé ďĺđĺőîä ę ěĺňîäó ďŕđŕëëĺëüíîăî ńáëčćĺíč˙ ń ńîáëţäĺíčĺě îăđŕíč÷ĺíčé ďî ęđčâčçíĺ (Đčń.2).
Đčńóíîę 2 äîďîëíĺí ńńűëęîé íŕ ŕíčěčđîâŕííîĺ čçîáđŕćĺíčĺ, ăäĺ ěîćíî ďîńěîňđĺňü ďëŕâíűé ďĺđĺőîä ę ďŕđŕëëĺëüíîěó ńáëčćĺíčţ.
Öĺëüţ äŕííîé ńňŕňüč ˙âë˙ĺňń˙ îďčńŕíčĺ ěĺňîäŕ, ďđč ęîňîđîě ďđĺńëĺäîâŕňĺëü äîńňčăŕĺň öĺëč â íŕçíŕ÷ĺííîĺ âđĺě˙ čç äîďóńňčěűő çíŕ÷ĺíčé. Ęŕę ńëĺäńňâčĺ, ěîćíî đŕńńěŕňđčâŕňü îäíîâđĺěĺííîĺ äîńňčćĺíčĺ ńâîčő öĺëĺé ăđóďďîé ďđĺńëĺäîâŕňĺëĺé.
III. Ňĺîđč˙
Ďî đĺçóëüňŕňŕě čńńëĺäîâŕíčé, đŕçđŕáîňŕíŕ ňĺńňîâŕ˙ ďđîăđŕěěŕ îäíîâđĺěĺííîăî äîńňčćĺíč˙ öĺëĺé ďđĺńëĺäîâŕňĺë˙ěč, ęîňîđóţ ěîćíî ďîńěîňđĺňü íŕ đĺńóđńĺ [6].  ýňîé ďđîăđŕěěĺ đĺŕëčçîâŕí ŕëăîđčňě, ęîňîđűé đĺŕëčçóĺň čňĺđŕöčîííóţ ńőĺěó đŕń÷ĺňŕ ňđŕĺęňîđčč ďđĺńëĺäîâŕňĺë˙, ďîęŕçŕííóţ íŕ đčńóíęĺ 3.
|
|
|
Đčń. 4. Îďđĺäĺëĺíčĺ đŕäčóńŕ îęđóćíîńňč íŕ ýďţđĺ Đŕäčůĺâŕ
|
 ěîäĺëč ń÷čňŕĺňń˙, ÷ňî ńóůĺńňâóĺň çŕâčńčěîńňü äë˙ ďđĺńëĺäîâŕňĺë˙  , ęîňîđűé äîńňčăŕĺň ńâîĺé öĺëč , ęîňîđűé äîńňčăŕĺň ńâîĺé öĺëč  , çŕ âđĺě˙ , çŕ âđĺě˙  : :  , ăäĺ , ăäĺ  – ęîîđäčíŕňű ňî÷ĺę ďîëîćĺíč˙ ďđĺńëĺäîâŕňĺë˙ č öĺëč â ěîěĺíň íŕ÷ŕëŕ ďđîöĺńńŕ ďđĺńëĺäîâŕíč˙, – ęîîđäčíŕňű ňî÷ĺę ďîëîćĺíč˙ ďđĺńëĺäîâŕňĺë˙ č öĺëč â ěîěĺíň íŕ÷ŕëŕ ďđîöĺńńŕ ďđĺńëĺäîâŕíč˙,  – ĺäčíč÷íűĺ âĺęňîđű íŕďđŕâëĺíč˙ äâčćĺíč˙ ďđĺńëĺäîâŕňĺë˙ č öĺëč â ěîěĺíň íŕ÷ŕëŕ ďđîöĺńńŕ ďđĺńëĺäîâŕíč˙, – ĺäčíč÷íűĺ âĺęňîđű íŕďđŕâëĺíč˙ äâčćĺíč˙ ďđĺńëĺäîâŕňĺë˙ č öĺëč â ěîěĺíň íŕ÷ŕëŕ ďđîöĺńńŕ ďđĺńëĺäîâŕíč˙,  - ěîäóëč ńęîđîńňĺé ďđĺńëĺäîâŕňĺë˙ č öĺëč â ďđîöĺńńĺ ďđĺńëĺäîâŕíč˙, - ěîäóëč ńęîđîńňĺé ďđĺńëĺäîâŕňĺë˙ č öĺëč â ďđîöĺńńĺ ďđĺńëĺäîâŕíč˙,  - đŕäčóń îęđóćíîńňč, ńěűńë ęîňîđîé ďîęŕçŕí íŕ đčńóíęŕő 1 č 3. Ôŕęňč÷ĺńęč, â ěîäĺëč ďîäń÷čňűâŕĺňń˙ ÷čńëî řŕăîâ, çŕ ęîňîđűĺ ďđĺńëĺäîâŕňĺëü äîńňčăŕĺň öĺëü. ×čńëî řŕăîâ, ďđč čçâĺńňíîě äčńęđĺňíîě ďđîěĺćóňęĺ âđĺěĺíč, ěîćíî ńîďîńňŕâčňü ńî âđĺěĺíĺě đĺŕëüíűě. - đŕäčóń îęđóćíîńňč, ńěűńë ęîňîđîé ďîęŕçŕí íŕ đčńóíęŕő 1 č 3. Ôŕęňč÷ĺńęč, â ěîäĺëč ďîäń÷čňűâŕĺňń˙ ÷čńëî řŕăîâ, çŕ ęîňîđűĺ ďđĺńëĺäîâŕňĺëü äîńňčăŕĺň öĺëü. ×čńëî řŕăîâ, ďđč čçâĺńňíîě äčńęđĺňíîě ďđîěĺćóňęĺ âđĺěĺíč, ěîćíî ńîďîńňŕâčňü ńî âđĺěĺíĺě đĺŕëüíűě.
Ĺńëč öĺëü äâčćĺňń˙ ďđ˙ěîëčíĺéíî č đŕâíîěĺđíî, ňî íŕřó çŕâčńčěîńňü âđĺěĺíč äîńňčćĺíč˙ öĺëč â óćĺ íŕ÷ŕâřĺěń˙ čňĺđŕöčîííîě ďđîöĺńńĺ ěîćíî ń÷čňŕňü ôóíęöčĺé îň äâóő ďĺđĺěĺííűő:  , îň ěîäóë˙ ńęîđîńňč ďđĺńëĺäîâŕňĺë˙ č îň đŕäčóńŕ ęđčâčçíű îęđóćíîńňč. , îň ěîäóë˙ ńęîđîńňč ďđĺńëĺäîâŕňĺë˙ č îň đŕäčóńŕ ęđčâčçíű îęđóćíîńňč.
Őîň˙, â ěîäĺëč ń÷čňŕĺňń˙, ÷ňî ďđĺńëĺäîâŕňĺëü äâčćĺňń˙ ń ďîńňî˙ííîé ńęîđîńňüţ  , íî íč÷ňî íĺ ěĺřŕĺň íŕě čçěĺí˙ňü çíŕ÷ĺíč˙ ěîäóë˙ ńęîđîńňč, ęŕę č đŕäčóńŕ ęđčâčçíű. Äîďóńňčě, ÷ňî ěîäóëü ńęîđîńňč ďđčíčěŕĺň äčńęđĺňíűĺ çíŕ÷ĺíč˙ čç đ˙äŕ , íî íč÷ňî íĺ ěĺřŕĺň íŕě čçěĺí˙ňü çíŕ÷ĺíč˙ ěîäóë˙ ńęîđîńňč, ęŕę č đŕäčóńŕ ęđčâčçíű. Äîďóńňčě, ÷ňî ěîäóëü ńęîđîńňč ďđčíčěŕĺň äčńęđĺňíűĺ çíŕ÷ĺíč˙ čç đ˙äŕ  , ŕ đŕäčóń îęđóćíîńňč čç đčńóíęîâ 1, 3 ďđčíčěŕĺň çíŕ÷ĺíč˙ , ŕ đŕäčóń îęđóćíîńňč čç đčńóíęîâ 1, 3 ďđčíčěŕĺň çíŕ÷ĺíč˙  . .
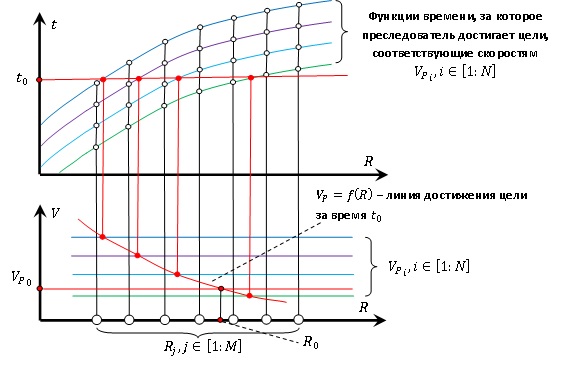
Äë˙ äŕëüíĺéřčő čńńëĺäîâŕíčé ďđčěĺí˙ĺňń˙ ýďţđ Đŕäčůĺâŕ [1], ăäĺ čńďîëüçóţňń˙ ęîîđäčíŕňíűĺ ďëîńęîńňč  č č  (Đčń. 4). (Đčń. 4).
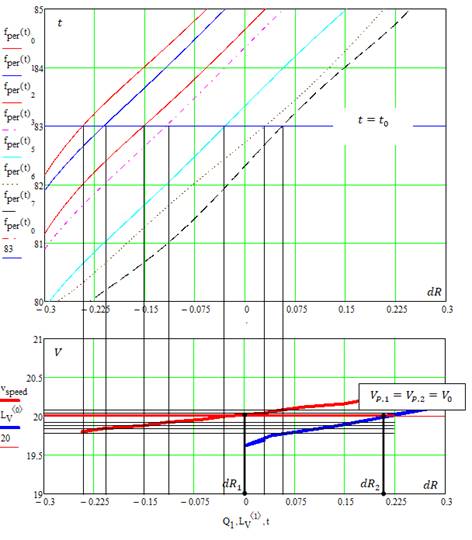
Íŕ đčńóíęĺ 4 ďîęŕçŕíî ýęńďĺđčěĺíňŕëüíîĺ ďîńňđîĺíčĺ âđĺěĺííűő çŕâčńčěîńňĺé  . Íŕ ďëîńęîńňč ńőĺěŕňč÷ĺńęč ďîęŕçŕíű ăđŕôčęč çŕâčńčěîńňĺé âđĺěĺí äîńňčćĺíč˙ öĺëč ďđĺńëĺäîâŕňĺëĺě îň đŕäčóńŕ îęđóćíîńňč ďđč ôčęńčđîâŕííîě çíŕ÷ĺíčč ńęîđîńňč . . Íŕ ďëîńęîńňč ńőĺěŕňč÷ĺńęč ďîęŕçŕíű ăđŕôčęč çŕâčńčěîńňĺé âđĺěĺí äîńňčćĺíč˙ öĺëč ďđĺńëĺäîâŕňĺëĺě îň đŕäčóńŕ îęđóćíîńňč ďđč ôčęńčđîâŕííîě çíŕ÷ĺíčč ńęîđîńňč .
 ęŕ÷ĺńňâĺ îäíîăî čç îďňčěčçčđóţůčő ôŕęňîđîâ [1] íŕ ďëîńęîńňč âűáčđŕĺňń˙ đŕâĺíńňâî  , ăäĺ , ăäĺ  - ňđĺáóĺěîĺ âđĺě˙ äîńňčćĺíč˙ öĺëč. Äŕëĺĺ, íŕ ďëîńęîńňč, äë˙ đĺřĺíč˙ íŕřĺé çŕäŕ÷č, íŕ ďëîńęîńňč â ęŕ÷ĺńňâĺ âňîđîăî îďňčěčçčđóţůĺăî ôŕęňîđŕ âűáčđŕĺňń˙ đŕâĺíńňâî - ňđĺáóĺěîĺ âđĺě˙ äîńňčćĺíč˙ öĺëč. Äŕëĺĺ, íŕ ďëîńęîńňč, äë˙ đĺřĺíč˙ íŕřĺé çŕäŕ÷č, íŕ ďëîńęîńňč â ęŕ÷ĺńňâĺ âňîđîăî îďňčěčçčđóţůĺăî ôŕęňîđŕ âűáčđŕĺňń˙ đŕâĺíńňâî  , ăäĺ , ăäĺ  - ýňî ďîńňî˙ííŕ˙ ńęîđîńňü ďđĺńëĺäîâŕňĺë˙. - ýňî ďîńňî˙ííŕ˙ ńęîđîńňü ďđĺńëĺäîâŕňĺë˙.
Őîň˙, â ďîńňŕíîâęĺ çŕäŕ÷č ăîâîđčňń˙ î ňîě, ÷ňî ěîäóëü ńęîđîńňč ďđĺńëĺäîâŕňĺë˙ ˙âë˙ĺňń˙ íĺčçěĺííűě, ďîńňđîĺííűé đ˙ä çíŕ÷ĺíčé ńęîđîńňĺé íĺîáőîäčě äë˙ đŕń÷ĺňŕ đŕäčóńŕ îęđóćíîńňč  íŕ ďëîńęîńňč ďđîĺęöčé . íŕ ďëîńęîńňč ďđîĺęöčé .
Ďî ëčíč˙ě ńâ˙çč íŕ ďëîńęîńňč ďđîĺęöčé íŕőîä˙ňń˙ ńîîňâĺňńňâóţůčĺ ňî÷ęč ďĺđĺńĺ÷ĺíč˙ ń ëčíč˙ěč óđîâí˙ ńęîđîńňĺé  (Đčń. 4). Ďî ďîëó÷ĺííűě ňî÷ęŕě â ňĺńňîâîé ďđîăđŕěěĺ âűďîëí˙ĺňń˙ ďîëčíîěčŕëüíŕ˙ đĺăđĺńńč˙ č, â čňîăĺ, ďîëó÷ŕĺě ôóíęöčţ çŕâčńčěîńňč ńęîđîńňč ďđĺńëĺäîâŕňĺë˙ îň đŕäčóńŕ îęđóćíîńňč, ďđč ęîňîđîé ďđîčńőîäčň äîńňčćĺíčĺ öĺëč çŕ âđĺě˙ . (Đčń. 4). Ďî ďîëó÷ĺííűě ňî÷ęŕě â ňĺńňîâîé ďđîăđŕěěĺ âűďîëí˙ĺňń˙ ďîëčíîěčŕëüíŕ˙ đĺăđĺńńč˙ č, â čňîăĺ, ďîëó÷ŕĺě ôóíęöčţ çŕâčńčěîńňč ńęîđîńňč ďđĺńëĺäîâŕňĺë˙ îň đŕäčóńŕ îęđóćíîńňč, ďđč ęîňîđîé ďđîčńőîäčň äîńňčćĺíčĺ öĺëč çŕ âđĺě˙ .
Çŕňĺě čůĺňń˙ ňî÷ęŕ ďĺđĺńĺ÷ĺíč˙ ôóíęöčč  (Đčń. 4) c ëčíčĺé óđîâí˙ . Ŕáńöčńńŕ ňî÷ęč ďĺđĺńĺ÷ĺíč˙ č ĺńňü čńęîěűé đŕäčóń îęđóćíîńňč, ÷ňîáű äîńňč÷ü öĺëč ďđĺńëĺäîâŕňĺëĺě P çŕ âđĺě˙ ńî ńęîđîńňüţ . (Đčń. 4) c ëčíčĺé óđîâí˙ . Ŕáńöčńńŕ ňî÷ęč ďĺđĺńĺ÷ĺíč˙ č ĺńňü čńęîěűé đŕäčóń îęđóćíîńňč, ÷ňîáű äîńňč÷ü öĺëč ďđĺńëĺäîâŕňĺëĺě P çŕ âđĺě˙ ńî ńęîđîńňüţ .
Đŕń÷ĺň âĺäĺňń˙ ďđč óńëîâčč ňîăî, ÷ňî öĺëü äâčćĺňń˙ đŕâíîěĺđíî č ďđ˙ěîëčíĺéíî. Ĺńëč öĺëü čçěĺí˙ĺň íŕďđŕâëĺíčĺ čëč ńęîđîńňü, ňî äë˙ äîńňčćĺíč˙ ĺĺ đŕńń÷čňűâŕĺňń˙ íîâűé đŕäčóń îęđóćíîńňč ńîńňŕâíîé áŕçîâîé ëčíčč (ŕíŕëîă ëčíčč âčçčđîâŕíč˙ ěĺňîäŕ ďŕđŕëëĺëüíîăî ńáëčćĺíč˙), ńňŕâčňń˙ íîâîĺ âđĺě˙ äîńňčćĺíč˙ ďđč ďđĺćíĺé ńęîđîńňč ďđĺńëĺäîâŕňĺë˙.
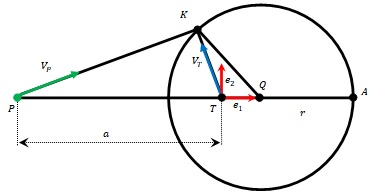
Íčçřčé ďđĺäĺë âđĺěĺíč äîńňčćĺíč˙ öĺëč ďđč ĺĺ đŕâíîěĺđíîě č ďđ˙ěîëčíĺéíîě äâčćĺíčč áóäĺň, ęîăäŕ ńęîđîńňü ďđĺńëĺäîâŕňĺë˙ íŕďđŕâëĺíŕ â ňî÷ęó  íŕ îęđóćíîńňč Ŕďîëëîíč˙ [2,3,4,5] (Đčń. 5). íŕ îęđóćíîńňč Ŕďîëëîíč˙ [2,3,4,5] (Đčń. 5).
|
|
|
Đčń. 5. Îęđóćíîńňü Ŕďîëëîíč˙
|
Îęđóćíîńňüţ Ŕďîëëîíč˙ íŕçűâŕĺňń˙ ăĺîěĺňđč÷ĺńęîĺ ěĺńňî ňî÷ĺę, îňíîřĺíčĺ đŕńńňî˙íčé îň ęîňîđűő äî äâóő çŕäŕííűő ňî÷ĺę — âĺëč÷číŕ ďîńňî˙ííŕ˙, íĺ đŕâíŕ˙ ĺäčíčöĺ. Íŕ đčńóíęĺ 5 ýňî ěîćíî ďđîčëëţńňđčđîâŕňü ęŕę:  . .
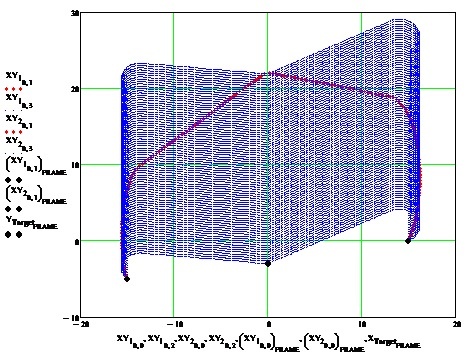
Ďđč đŕńńěîňđĺíčč ěíîćĺńňâĺííîăî ďđĺńëĺäîâŕíč˙ ăđóďďű öĺëĺé, ňî â ňĺńňîâîé ďđîăđŕěěĺ ďđîčçâîäčňń˙ ďđĺäâŕđčňĺëüíűé đŕń÷ĺň ňđŕĺęňîđčé äâčćĺíč˙ ďđĺńëĺäîâŕňĺëĺé ďđč çŕäŕííűő íŕ÷ŕëüíűő ďŕđŕěĺňđŕő. Čç âđĺěĺí äîńňčćĺíč˙ öĺëĺé äë˙ đŕń÷ĺňŕ îäíîâđĺěĺííîăî äîńňčćĺíč˙ âűáčđŕĺňń˙ íŕčáîëüřĺĺ âđĺě˙. Č ýňî âđĺě˙ âűáčđŕĺňń˙ ęđčňĺđčĺě äë˙ đŕń÷ĺňŕ ňđŕĺęňîđčé îńňŕëüíűő ďđĺńëĺäîâŕňĺëĺé. Ýňîň ěîěĺíň ďđîčëëţńňđčđîâŕí íŕ đčńóíęĺ 2, đčńóíîę 2 äîďîëíĺí ńńűëęîé íŕ ŕíčěčđîâŕííîĺ čçîáđŕćĺíčĺ, ăäĺ ěîćíî áóäĺň ďîńěîňđĺňü íŕ îäíîâđĺěĺííîĺ äîńňčćĺíčĺ öĺëč äâóě˙ ďđĺńëĺäîâŕňĺë˙ěč.
|
|
|
Đčń. 6 Äîńňčćĺíčĺ öĺëĺé â đŕçëč÷íîĺ íŕçíŕ÷ĺííîĺ âđĺě˙
|
Íŕ đčńóíęĺ 6 ďîęŕçŕíî, ęŕę äë˙ îäíîăî čç ďđĺńëĺäîâŕňĺëĺé áűëî óńňŕíîâëĺíî áîëĺĺ ęîđîňęîĺ âđĺě˙ äîńňčćĺíč˙ öĺëč. Đčńóíîę 6 ňŕęćĺ äîďîëíĺí ńńűëęîé íŕ ŕíčěčđîâŕííîĺ čçîáđŕćĺíčĺ, ăäĺ ěîćíî ďîńěîňđĺňü äîńňčćĺíčĺ öĺëĺé â đŕçëč÷íîĺ íŕçíŕ÷ĺííîĺ âđĺě˙.
IV. Đĺçóëüňŕňű ýęńďĺđčěĺíňîâ
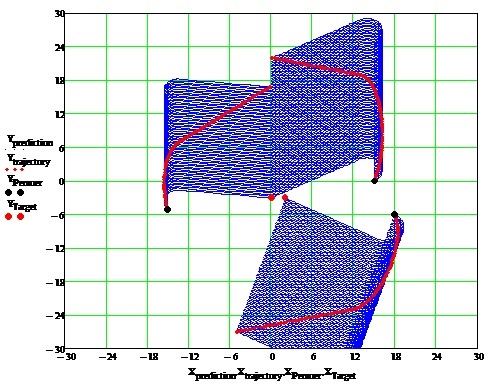
Íŕ đčńóíęĺ 7 ďđčâĺäĺíű íĺęîňîđűĺ đĺçóëüňŕňű đŕáîňű ěíîăîôŕęňîđíîăî ŕíŕëčçŕ â çŕäŕ÷ĺ îäíîâđĺěĺííîăî äîńňčćĺíč˙ öĺëč äâóě˙ ďđĺńëĺäîâŕňĺë˙ěč. Öĺëü äâčćĺňń˙ ďđ˙ěîëčíĺéíî č đŕâíîěĺđíî. Äë˙ ęŕćäîăî ďđĺńëĺäîâŕňĺë˙ ďîńňđîčëč đ˙ä äîďóńňčěűő ńęîđîńňĺé. Đ˙ä äîďóńňčěűő çíŕ÷ĺíčé đŕäčóńŕ îęđóćíîńňč âŕđüčđóĺňń˙ ďđč ďîěîůč äčńęđĺňíűő ďĺđĺěĺííîé  . Íŕ ăđŕôčęŕő đčńóíęŕ 7 ýňî řęŕëŕ . . Íŕ ăđŕôčęŕő đčńóíęŕ 7 ýňî řęŕëŕ .
Íŕ ďëîńęîńňč ďđîĺęöčé  ńňđîčě îäíîďŕđŕěĺňđč÷ĺńęóţ ńĺňü ëčíčé. Ęŕćäŕ˙ ëčíč˙ ńîîňâĺňńňâóĺň îďđĺäĺëĺííîěó çíŕ÷ĺíčţ ńęîđîńňč č âűđŕćŕĺň çŕâčńčěîńňü âđĺěĺíč äîńňčćĺíč˙ öĺëč îň ďđčđŕůĺíč˙ đŕäčóńŕ îęđóćíîńňč. Íŕ ăđŕôčęĺ đčńóíęŕ 7 ďîęŕçŕíŕ îäíîďŕđŕěĺňđč÷ĺńęŕ˙ ńĺňü ëčíčé ńęîđîńňĺé îäíîăî čç ďđĺńëĺäîâŕňĺëĺé. Äë˙ âňîđîăî â ňĺńňîâîé ďđîăđŕěěĺ ěíîăîôŕęňîđíîăî ŕíŕëčçŕ ďîńňđîĺíŕ ŕíŕëîăč÷íŕ˙ ńĺňü. ńňđîčě îäíîďŕđŕěĺňđč÷ĺńęóţ ńĺňü ëčíčé. Ęŕćäŕ˙ ëčíč˙ ńîîňâĺňńňâóĺň îďđĺäĺëĺííîěó çíŕ÷ĺíčţ ńęîđîńňč č âűđŕćŕĺň çŕâčńčěîńňü âđĺěĺíč äîńňčćĺíč˙ öĺëč îň ďđčđŕůĺíč˙ đŕäčóńŕ îęđóćíîńňč. Íŕ ăđŕôčęĺ đčńóíęŕ 7 ďîęŕçŕíŕ îäíîďŕđŕěĺňđč÷ĺńęŕ˙ ńĺňü ëčíčé ńęîđîńňĺé îäíîăî čç ďđĺńëĺäîâŕňĺëĺé. Äë˙ âňîđîăî â ňĺńňîâîé ďđîăđŕěěĺ ěíîăîôŕęňîđíîăî ŕíŕëčçŕ ďîńňđîĺíŕ ŕíŕëîăč÷íŕ˙ ńĺňü.
Äë˙ ęŕćäîăî ďđĺńëĺäîâŕňĺë˙ âűáčđŕĺňń˙ ďĺđâűé îďňčěčçčđóţůčé ôŕęňîđ [1], îňâĺ÷ŕţůčé çŕ îäíîâđĺěĺííîĺ äîńňčćĺíčĺ, . Ăäĺ - íŕčáîëüřĺĺ čç âđĺěĺí äîńňčćĺíč˙ öĺëč, ĺńëč áű ďđĺńëĺäîâŕňĺëč íĺçŕâčńčěî äîăîí˙ëč öĺëü ďđč ňŕęčő ćĺ íŕ÷ŕëüíűő óńëîâč˙ő. Íŕ ďëîńęîńňč čůóňń˙ ňî÷ęč ďĺđĺńĺ÷ĺíč˙ ń ëčíčé óđîâí˙ ń ëčíč˙ěč ńęîđîńňĺé îäíîďŕđŕěĺňđč÷ĺńęîé ńĺňč. Ňî÷ęč ďĺđĺńĺ÷ĺíč˙ íŕőîä˙ňń˙ ďđč ďîěîůč âńňđîĺííűő ďđîöĺäóđ đĺřĺíč˙ óđŕâíĺíčé.  ńčńňĺěĺ ęîěďüţňĺđíîé ěŕňĺěŕňčęč MathCAD ýňî ěîćĺň áűňü ďđîöĺäóđŕ root. Íŕéäĺííűě ňî÷ęŕě ďĺđĺńĺ÷ĺíč˙ îňâĺ÷ŕţň çíŕ÷ĺíč˙ č  íŕ ďëîńęîńňč ďđîĺęöčé íŕ ďëîńęîńňč ďđîĺęöčé  . .
Ę ďîëó÷ĺííűě ňî÷ęŕě íŕ ďëîńęîńňč ďđîĺęöčé ďđčěĺí˙ĺňń˙ âńňđîĺííŕ˙ ďđîöĺäóđŕ ďîëčíîěčŕëüíîé đĺăđĺńńčč č íŕőîäčňń˙ őŕđŕęňĺđčńňč÷ĺńęŕ˙ ęđčâŕ˙ çŕâčńčěîńňč ńęîđîńňč îň đŕäčóńŕ îęđóćíîńňč ńîńňŕâíîé áŕçîâîé ëčíčč, ęîňîđűĺ ďđčâĺäĺíű íŕ đčńóíęĺ 1.
Íŕ đčńóíęĺ 7, íŕ ďëîńęîńňč ďđîĺęöčé čçîáđŕćĺíŕ ňŕęŕ˙ ćĺ őŕđŕęňĺđčńňč÷ĺńęŕ˙ ëčíč˙ çŕâčńčěîńňč ńęîđîńňč č äë˙ äđóăîăî ďđĺńëĺäîâŕňĺë˙. Äŕëĺĺ, ďđčěĺí˙ňń˙ âňîđîé îďňčěčçčđóţůčé ôŕęňîđ  .  ňĺńňîâîé ďđîăđŕěěĺ îáúĺęňű äâčćóňń˙ ń îäčíŕęîâűěč ńęîđîńň˙ěč. Âńňđîĺííűěč ńđĺäńňâŕěč ęîěďüţňĺđíîé ěŕňĺěŕňčęč čůóňń˙ ňî÷ęč ďĺđĺńĺ÷ĺíč˙ ń ëčíčĺé óđîâí˙ .  ňĺńňîâîé ďđîăđŕěěĺ îáúĺęňű äâčćóňń˙ ń îäčíŕęîâűěč ńęîđîńň˙ěč. Âńňđîĺííűěč ńđĺäńňâŕěč ęîěďüţňĺđíîé ěŕňĺěŕňčęč čůóňń˙ ňî÷ęč ďĺđĺńĺ÷ĺíč˙ ń ëčíčĺé óđîâí˙  . Ýňčě ňî÷ęŕě ńîîňâĺňńňâóţň çíŕ÷ĺíč˙ . Ýňčě ňî÷ęŕě ńîîňâĺňńňâóţň çíŕ÷ĺíč˙  č č  . .
| |
|
Đčń. 7. Đĺçóëüňŕňű ěíîăîôŕęňîđíîăî ŕíŕëčçŕ
|
Ďđč çŕďóńęĺ čňĺđŕöčîííîăî ďđîöĺńńŕ ń çŕäŕííűě çíŕ÷ĺíčĺě âđĺěĺíč äîńňčćĺíč˙ öĺëč , ń çŕäŕííűěč ěîäóë˙ěč ńęîđîńňĺé äâčćĺíč˙  , ń íŕéäĺííűěč çíŕ÷ĺíč˙ěč ďđčđŕůĺíčé č ę íŕ÷ŕëüíîěó đŕäčóńó îęđóćíîńňč äîńňčăíóňî îäíîâđĺěĺííîĺ äîńňčćĺíčĺ öĺëč äâóě˙ ďđĺńëĺäîâŕňĺë˙ěč. Ýňîň ôŕęň ď , ń íŕéäĺííűěč çíŕ÷ĺíč˙ěč ďđčđŕůĺíčé č ę íŕ÷ŕëüíîěó đŕäčóńó îęđóćíîńňč äîńňčăíóňî îäíîâđĺěĺííîĺ äîńňčćĺíčĺ öĺëč äâóě˙ ďđĺńëĺäîâŕňĺë˙ěč. Ýňîň ôŕęň ď
| 

 Cn
Cn